

แหล่งเรียนรู้สำนักงานพัฒนาเทคโนโลยีอวกาศและภูมิสารสนเทศ (องค์การมหาชน)
- 1. การแนะนำ
- 2. ตัวชี้วัดและจุดประสงค์การเรียนรู้
- 3. ความเป็นมา
- 4. ดาวเทียมของไทย
- 5. การควบคุมดาวเทียม
- 6. การรับสัญญาณและผลิตข้อมูลดาวเทียม
- 7. รูปแบบคลื่นที่ส่งและรับระหว่างดาวเทียมและภาคพื้น
- 8. การถ่ายภาพจากดาวเทียม
- 9. การแปลข้อมูลจากดาวเทียม
- 10. อากาศยานไร้คนขับ
- 11. นักบินอวกาศหญิงคนแรกของไทย
- 12. อ้างอิง
- - ทุกหน้า -

สำนักงานพัฒนาเทคโนโลยีอวกาศและภูมิสารสนเทศ (องค์การมหาชน) มีตัวย่อว่า "สทอภ. และมีชื่อภาษาอังกฤษ "Geo-Informatics and Space Technology Development Agency (Public Organization) – GISTDA " เป็นหน่วยงานของรัฐในรูปแบบองค์การมหาชนในกำกับของกระทรวงวิทยาศาสตร์และเทคโนโลยี ที่มุ่งเน้นการบริหารและดำเนินงานอย่างมีประสิทธิภาพ เพื่อบริการข้อมูลภูมิสารสนเทศจากอวกาศ บริการวิชาการต่าง ๆ ตลอดจนการวิจัยและพัฒนาเทคโนโลยีอวกาศให้เป็นประโยชน์ต่อประชาชน
กลับไปที่เนื้อหา
สาระ มาตรฐานและตัวชี้วัด ตามหลักสูตรแกนกลางการศึกษาขั้นพื้นฐาน พุทธศักราช 2551 ช่วงชั้นที่ 3 (ม.1-ม.3)
สาระที่ 2 การออกแบบและเทคโนโลยี กลุ่มสาระการเรียนรู้การงานอาชีพและเทคโนโลยี
มาตรฐาน ง 2.1 เข้าใจเทคโนโลยีและกระบวนการเทคโนโลยี ออกแบบและสร้างสิ่งของเครื่องใช้หรือวิธีการ ตามกระบวนการเทคโนโลยีอย่างมีความคิดสร้างสรรค์ เลือกใช้เทคโนโลยีในทางสร้างสรรค์ต่อชีวิตสังคม สิ่งแวดล้อม และ มีส่วนร่วมในการจัดการเทคโนโลยีที่ยั่งยืน
ตัวชี้วัด
ม.2 (4) เลือกใช้เทคโนโลยีอย่างสร้างสรรค์ต่อชีวิต สังคม และสิ่งแวดล้อมและมีการจัดการเทคโนโลยีด้วยการลดการใช้ทรัพยากรหรือเลือกใช้เทคโนโลยีที่ไม่มีผลกระทบต่อสิ่งแวดล้อม
ม.3 (1) อธิบายระดับของเทคโนโลยี
สาระที่ 7 ดาราศาสตร์และอวกาศ กลุ่มสาระการเรียนรู้วิทยาศาสตร์
มาตรฐาน ว 7.2 เข้าใจความสำคัญของเทคโนโลยีอวกาศที่นำมาใช้ในการสำรวจอวกาศและ ทรัพยากรธรรมชาติ ด้านการเกษตรและการสื่อสาร มีกระบวนการสืบเสาะหาความรู้และจิตวิทยาศาสตร์ สื่อสารสิ่งที่เรียนรู้และนำความรู้ไปใช้ประโยชน์อย่างมีคุณธรรมต่อชีวิตและสิ่งแวดล้อม
ตัวชี้วัด
ม.3 (1) สืบค้นและอภิปรายความก้าวหน้าของเทคโนโลยีอวกาศที่ใช้สำรวจอวกาศ วัตถุท้องฟ้า สภาวะอากาศ ทรัพยากรธรรมชาติ การเกษตรและการสื่อสาร
จุดประสงค์การเรียนรู้
1. อธิบายระดับของเทคโนโลยีของเทคโนโลยีอวกาศได้
2. เลือกใช้ข้อมูลที่ได้จากเทคโนโลยีอวกาศ
3. เข้าใจความสำคัญของเทคโนโลยีอวกาศที่นำมาใช้ในการสำรวจอวกาศและทรัพยากรธรรมชาติ
4. อธิบายความก้าวหน้าของเทคโนโลยีอวกาศที่ใช้ในการสำรวจอวกาศและทรัพยากรธรรมชาติ
กลับไปที่เนื้อหา

สำนักงานพัฒนาเทคโนโลยีอวกาศและภูมิสารสนเทศ หรือ GISTDA เริ่มต้นมาจากการที่ประเทศไทยได้เข้าร่วมโครงการ NASA ERTS-1 ซึ่งเป็นดาวเทียมสำรวจทรัพยากรดวงแรกของโลก เมื่อวันที่ 14 กันยายน พ.ศ.2514 ภายใต้การดำเนินงานของโครงการสำรวจทรัพยากรธรรมชาติด้วยดาวเทียม สำนักงานคณะกรรมการวิจัยแห่งชาติ โดยทำหน้าที่ประสานงาน จัดหาข้อมูลดาวเทียม ดำเนินการวิเคราะห์ข้อมูล ถ่ายทอดเทคโนโลยี ตลอดจนจัดหาทุนฝึกอบรม ดูงาน และการประชุม ทั้งระดับประเทศและนานาชาติ ด้วยผลสำเร็จของโครงการ จึงได้มีการเปลี่ยนสถานภาพโครงการฯ เป็นหน่วยงานระดับกองชื่อ กองสำรวจทรัพยากรธรรมชาติด้วยดาวเทียม ในปี พ.ศ.2522 และในปี พ.ศ.2525 ได้ดำเนินการจัดตั้งสถานีรับสัญญาณดาวเทียมขึ้นที่เขตลาดกระบัง กรุงเทพมหานคร นับเป็นสถานีรับสัญญาณแห่งแรกในภูมิภาคเอเชียตะวันออกเฉียงใต้ เมื่อปี พ.ศ. 2541 รัฐบาลมีนโยบายปฏิรูประบบราชการเพื่อให้การทำงานคล่องตัวขึ้น จึงได้ประกาศใช้พระราชบัญญัติองค์การมหาชน พ.ศ.2542 และด้วยความสำคัญของการใช้เทคโนโลยีด้านการสำรวจข้อมูลระยะไกลและระบบสารสนเทศภูมิศาสตร์ในการพัฒนาประเทศ ในปี พ.ศ.2543 กระทรวงวิทยาศาสตร์ เทคโนโลยีและสิ่งแวดล้อม ได้จัดตั้งหน่วยงานใหม่โดยรวมกองสำรวจทรัพยากรธรรมชาติด้วยดาวเทียม สำนักงานคณะกรรมการวิจัยแห่งชาติ และฝ่ายประสานงานและส่งเสริมการพัฒนาระบบสารสนเทศภูมิศาสตร์ ศูนย์ข้อมูลข้อสนเทศ สำนักงานปลัดกระทรวงวิทยาศาสตร์ เทคโนโลยีและสิ่งแวดล้อม ตามพระราชกฤษฎีกา เมื่อวันที่ 2 พฤศจิกายน พ.ศ.2543 ในนามของ " สำนักงานพัฒนาเทคโนโลยีอวกาศและภูมิสารสนเทศ (องค์การมหาชน) " ตั้งแต่วันที่ 3 พฤศจิกายน พ.ศ.2543


ในปัจจุบันสำนักงานพัฒนาเทคโนโลยีอวกาศและภูมิสารสนเทศ (องค์การมหาชน) มีตัวย่อว่า "สทอภ." และมีชื่อภาษาอังกฤษ "Geo-Informatics and Space Technology Development Agency (Public Organization) - GISTDA" เป็นหน่วยงานของรัฐในรูปแบบองค์การมหาชน ที่อยู่ภายใต้การกำกับดูแลของกระทรวงวิทยาศาสตร์และเทคโนโลยี ซึ่งมุ่งเน้นการบริหารและดำเนินงานอย่างมีประสิทธิภาพ เพื่อบริการ ข้อมูลภูมิสารสนเทศ บริการวิชาการต่าง ๆ ตลอดจนการวิจัยและพัฒนาเทคโนโลยีอวกาศให้เป็นประโยชน์ต่อประชาชน โดยหน้าที่หลักของ GISTDA มีดังนี้
1. ผลิต จัดหา รวบรวม วิเคราะห์ และจัดทำคลังข้อมูลจากดาวเทียมสำรวจทรัพยากรและ ภูมิสารสนเทศเพื่อการพัฒนาประเทศ
2. ให้บริการข้อมูล และให้คำปรึกษาด้านเทคโนโลยีอวกาศและภูมิสารสนเทศทั้งในประเทศและระดับสากล
3. การพัฒนาเครือข่ายความร่วมมือและการให้บริการด้านเทคโนโลยีอวกาศและภูมิสารสนเทศใน ระดับสากลทั้งในและต่างประเทศ
4. พัฒนาขีดความสามารถในการให้บริการ การสร้างอุตสาหกรรมต่อเนื่อง การสร้างมูลค่าเพิ่ม และหารายได้โดยไม่แสวงหากำไรจากการบริการ (ทั้งด้านวิชาการและข้อมูล)
5. พัฒนาบุคลากรด้านเทคโนโลยีอวกาศและภูมิสารสนเทศทั้งในและต่างประเทศ
6. วิจัยและพัฒนาเทคโนโลยีอวกาศและภูมิสารสนเทศและระบบดาวเทียมสำรวจทรัพยากร
7. การพัฒนาโครงสร้างพื้นฐานด้านเทคโนโลยีภูมิสารสนเทศ
GISTDA แบ่งสถานที่ตั้งของหน่วยงานออกเป็น 4 แห่ง ดังนี้
1. สำนักงานใหญ่ (ศูนย์ราชการเฉลิมพระเกียรติ 80 พรรษา 5 ธันวาคม 2550) อาคารรวม หน่วยราชการ (อาคารรัฐประศาสนภักดี) ชั้น 6 และชั้น 7 ถนนแจ้งวัฒนะ แขวงทุ่งสองห้อง เขตหลักสี่ กรุงเทพมหานคร
2. สำนักงานพัฒนาเทคโนโลยีอวกาศและภูมิสารสนเทศ (บางเขน) ถนนพหลโยธิน แขวงลาดยาว เขตจตุจักร กรุงเทพมหานคร
3. ศูนย์ดาวเทียมภาคพื้นดิน (ลาดกระบัง) สำนักงานพัฒนาเทคโนโลยีอวกาศและภูมิสารสนเทศ (องค์การมหาชน) ถนนฉลองกรุง เขตลาดกระบัง กรุงเทพมหานคร
4. สถานีควบคุมและรับสัญญาณดาวเทียม THEOS (ศรีราชา) สำนักงานพัฒนาเทคโนโลยีอวกาศและ ภูมิสารสนเทศ (องค์การมหาชน) ตำบลทุ่งสุขลา อำเภอศรีราชา จังหวัดชลบุรี
โดยแต่ละแห่งจะมีภาระหน้าที่ในการทำงานที่แตกต่างกันออกไป โดยเฉพาะอย่างยิ่งที่สถานีควบคุมและรับสัญญาณดาวเทียม THEOS (ศรีราชา) จะมีหน้าที่ด้านภารกิจนวัตกรรมอวกาศ ประกอบด้วยหน่วยงานย่อย คือ
1. สำนักปฏิบัติการดาวเทียม ทำหน้าที่ในการควบคุมและรับสัญญาณของดาวเทียมไทยโชต ซึ่งข้อมูลที่ได้จะมีการทำคลังข้อมูลดาวเทียมทั้งรายละเอียดสูง ปานกลาง และต่ำ เพื่อนำข้อมูลที่ได้ไปดำเนินการวิเคราะห์ข้อมูล และผลิตเป็นแผนที่เฉพาะกิจ รวมทั้งดำเนินการจัดทำข้อมูลในลักษณะสารสนเทศภูมิศาสตร์ (GIS) โดยข้อมูลต่างๆ เหล่านี้จะถูกส่งไปยังสำนักงานใหญ่ (ศูนย์ราชการเฉลิมพระเกียรติ 80 พรรษา 5 ธันวาคม 2550) เพื่อนำไปให้บริการแก่หน่วยงานต่างๆ ทั้งภาครัฐและเอกชนภายในและนอกประเทศทั่วโลกต่อไป
2. สำนักพัฒนาอุทยานรังสรรค์นวัตกรรมอวกาศ (Space Krenovation Park) มีหน้าที่สำคัญคือ ช่วยเติมเต็มศักยภาพการแข่งขันให้กับผู้ประกอบการในด้านการวิจัยและพัฒนาเทคโนโลยีอวกาศและภูมิสารสนเทศโดยตรง ซึ่งถือเป็นการนำข้อมูลสารสนเทศที่มีอยู่ อาทิ ข้อมูลภาพจากดาวเทียมส่งตรงจากเรดาร์ 6 ดวง ซึ่งมีการรายงานผลแบบเรียลไทม์ จากดาวเทียมเรดาร์ของประเทศอิตาลี 4 ดวง และสหรัฐอเมริกา 2 ดวง มาใช้ให้เกิดประโยชน์ในเชิงพาณิชย์อย่างคุ้มค่า
อุทยานรังสรรค์นวัตกรรมอวกาศแห่งนี้มีลักษณะคล้ายกับอุทยานวิทยาศาสตร์ประเทศไทย รังสิต ปทุมธานี คือเป็นพื้นที่ให้ผู้ประกอบการเข้ามาทำวิจัยและพัฒนานวัตกรรม แต่เน้นไปในด้านเทคโนโลยีอวกาศและภูมิสารสนเทศ เช่น การนำข้อมูลภาพถ่ายดาวเทียมมาใช้ต่อยอดในงานวิจัย หรือการวางแผนบริหารจัดการองค์กร ซึ่งทางอุทยานรังสรรค์นวัตกรรมอวกาศ จะมีพื้นที่ อุปกรณ์ และฐานข้อมูลรองรับการทำงาน รวมถึงบุคลากรที่ชำนาญด้านเทคโนโลยีอวกาศและภูมิสารสนเทศคอยให้คำปรึกษา นอกจากนี้อุทยานรังสรรค์นวัตกรรมอวกาศแห่งนี้ยังทำหน้าที่เป็นเวทีแสดงความเป็นมาด้านเทคโนโลยีอวกาศและภูมิสารสนเทศเพื่อกระตุ้นให้เกิดจินตนาการแก่ผู้เข้าชม และบ่มเพาะผู้ประกอบการหน้าใหม่ภายใต้ความร่วมมือกับสถาบันศึกษาต่างๆด้วย
ปัจจุบัน สำนักงานพัฒนาเทคโนโลยีอวกาศและภูมิสารสนเทศ (สทอภ.) ให้บริการข้อมูลดาวเทียมสำรวจทรัพยากรดวงต่าง ๆ ที่มีคุณลักษณะของข้อมูลหลายประเภท เช่น ดาวเทียม LANDSAT, SPOT, IRS, IKONOS, QUICKBIRD และ NOAA เป็นต้น โดยให้บริการใน 2 ลักษณะ คือ
1. ผลิตภัณฑ์พื้นฐาน
- ข้อมูลเชิงเลข (digital) สทอภ.ให้บริการในรูปแบบ CD-ROM และ DVD โดยใช้กับโปรแกรมทาง รีโมตเซนซิง ผู้ใช้สามารถปรับแต่ง เน้นข้อมูล ผสมสี และซ้อนทับกับข้อมูล GIS อันเป็นประโยชน์ต่อการวิเคราะห์ข้อมูล
- ข้อมูลภาพในรูปแบบภาพพิมพ์ (paper print) มีมาตราส่วน 1:250,000, 1:50,000 จนถึง 1:4,000
2. ผลิตภัณฑ์เพิ่มค่า
- มีทั้งในรูปแบบข้อมูลเชิงเลขและภาพพิมพ์ เช่น ภาพโมเสกประเทศไทย, แผนที่ภาพถ่ายจากดาวเทียม (Image Map) ซึ่งนำข้อมูลจากดาวเทียมมาปรับแก้ไขให้มีความถูกต้องเชิงตำแหน่ง และซ้อนทับกับแผนที่ภูมิประเทศของกรมแผนที่ทหาร ภายใต้ความร่วมมือกับกรมแผนที่ทหาร
นอกจากนี้ สำนักงานพัฒนาเทคโนโลยีอวกาศและภูมิสารสนเทศ (สทอภ.) ยังให้บริการข้อมูลทุ่น สมุทรศาสตร์ ซึ่งเป็นข้อมูลด้านอุตุนิยมวิทยาได้แก่ อุณหภูมิอากาศ, ความเร็วและทิศทางลม ฯ และข้อมูลด้าน สมุทรศาสตร์ ได้แก่ ความเร็วและทิศทางกระแสน้ำ, อุณหภูมิผิวหน้าทะเล เป็นต้น ยิ่งไปกว่านั้นทา สทภอ. ยังให้บริการจัดทำโครงการและให้คำปรึกษาในการนำข้อมูลดาวเทียม ข้อมูลสนเทศทางภูมิศาสตร์ รวมถึงการฝึกอบรมพัฒนาบุคลากรให้มีความรู้ความสามารถในการประยุกต์ต่อการพัฒนาประเทศในด้านต่างๆ อีกด้วย
วีดิทัศน์ เรื่องความเป็นมาของ GISTDA
กลับไปที่เนื้อหา
ดาวเทียม (Satellite) เป็นอุปกรณ์ที่ถูกสร้างขึ้นแล้วติดตั้งบนจรวดหรือยานขนส่งอวกาศเพื่อนำไปปล่อยไว้ในวงโคจรรอบโลก ดาวเทียมจะเคลื่อนที่อย่างรวดเร็วในอวกาศ มีการรับส่งสัญญาณวิทยุระหว่างดาวเทียมและสถานีภาคพื้นเพื่อใช้ประโยชน์ในงานด้านต่างๆ เช่น ถ่ายภาพตรวจอากาศ โทรคมนาคม และปฏิบัติการทางวิทยาศาสตร์ เป็นต้น ดาวเทียมที่ใช้กันในปัจจุบันมีการแบ่งจำแนกได้หลายลักษณะ ได้แก่ แบ่งตามความสูงของวงโคจร แบ่งตามรูปแบบของวงโคจร เป็นต้น แต่จากข้อมูลหลายแหล่งจะมีการแบ่งประเภทของดาวเทียมออกออกตามประโยชน์ใช้งาน ซึ่งสามารถแบ่งได้เป็น 5 ประเภท (ศูนย์การเรียนรู้วิทยาศาสตร์โลกและดาศาสตร์, 2557 : ออนไลน์) ดังนี้
1. ดาวเทียมทำแผนที่ เป็นดาวเทียมที่มีวงโคจรต่ำ(LEO) ที่ระดับความสูงไม่เกิน 800 กิโลเมตร เพื่อให้ได้ภาพที่มีรายละเอียดสูง และเป็นดาวเทียมที่มีวงโคจรใกล้ขั้วโลก (Polar orbit) เพื่อให้สแกนพื้นผิวถ่ายภาพได้ครอบคลุม ทุกพื้นที่ของโลก ภาพถ่ายดาวเทียมที่ได้สามารถนำไปใช้ในการทำแผนที่ ผังเมือง และการทำจารกรรมสอดแนมทางการทหาร
2. ดาวเทียมสำรวจทรัพยากร เป็นดาวเทียมวงโคจรต่ำที่มีวงโคจรแบบใกล้ขั้วโลก (Near Polar Orbit) ที่ระยะสูงประมาณ 800 กิโลเมตร จึงไม่มีรายละเอียดสูงเท่าภาพถ่ายที่ได้จากดาวเทียมทำแผนที่ เพราะเน้นการครอบคลุมพื้นที่เป็นบริเวณกว้าง และทำการบันทึกภาพได้ทั้งในช่วงแสงที่ตามองเห็นและรังสีอินฟราเรด เนื่องจากโลกแผ่รังสีอินฟราเรดออกมา จึงสามารถบันทึกภาพได้แม้ในเวลากลางคืน ดาวเทียมประเภทนี้จะใช้หลักการทำงานของ Remote Sensing
3. ดาวเทียมอุตุนิยมวิทยา เป็นดาวเทียมซึ่งใช้ในการตรวจวัดข้อมูลทางอุตุนิยมวิทยาที่มีประโยชน์อย่างยิ่ง เนื่องจากสามารถตรวจวัดข้อมูลอากาศในที่ๆ มนุษย์ไม่สามารถทำการตรวจวัดได้โดยตรงจากเครื่องมือตรวจอากาศ ชนิดอื่นๆ เนื่องจากข้อมูลเหล่านี้อยู่ในที่มนุษย์ไม่สามารถเข้าถึงได้ เพื่อนำข้อมูลที่ได้มาใช้ประโยชน์เพื่อการพยากรณ์อากาศและรายงานสภาพลมฟ้าอากาศต่างๆ รวมทั้งปรากฏการณ์ธรรมชาติที่เกี่ยวข้องกับชั้นบรรยากาศของโลก ประเทศไทยได้มีการนำดาวเทียมอุตุนิยมวิทยามาใช้กับหน่วยงานต่างๆ เช่น กรมอุตุนิยมวิทยา เพื่อประโยชน์ทางด้านอุตุนิยมวิทยา การเกษตร การประมง และสิ่งแวดล้อม ดาวเทียมอุตุนิยมวิทยาแบ่งออกเป็น 2 ลักษณะ คือ
3.1 ชนิดวงโคจรค้างฟ้า (Geostationary Meteorological Satellite) โคจรรอบโลกใช้เวลา 24 ชั่วโมง เท่ากับโลกหมุนรอบตัวเอง โดยวงโคจรอยู่ในตำแหน่งเส้นศูนย์สูตรของโลกมีความสูงจากพื้นโลกประมาณ 35,800 กิโลเมตร และโคจรไปในทางเดียวกับการหมุนของโลก ทำให้ตำแหน่งดาวเทียมจะสัมพันธ์กับตำแหน่งบนพื้นโลกในบริเวณเดิมเสมอ ดาวเทียมวงโคจรค้างฟ้านี้จะอยู่ที่ระดับสูงทำให้ถ่ายภาพมุมกว้างครอบคลุมทวีปและมหาสมุทร
3.2 ชนิดวงโคจรผ่านใกล้ขั้วโลก(Near Polar Orbiting Meteorological Satellite) โคจรผ่านใกล้ขั้วโลกเหนือและใต้ มีความสูงจากพื้นโลกประมาณ 850 กิโลเมตร โคจรรอบโลกประมาณ 102 นาที ต่อ 1 รอบ ในหนึ่งวันจะหมุนรอบโลกประมาณ 14 รอบ และจะเคลื่อนที่ผ่านเส้นศูนย์สูตรในเวลาเดิม (ตามเวลาท้องถิ่น) 2 ครั้ง โดยโคจรเคลื่อนที่จากขั้วโลกเหนือไปยังขั้วโลกใต้ 1 ครั้ง และโคจรเคลื่อนที่จากขั้วโลกใต้ไปยังขั้วโลกเหนืออีก 1 ครั้ง การถ่ายภาพของดาวเทียมชนิดนี้ จะถ่ายภาพและส่งสัญญาณข้อมูลสู่ภาคพื้นดินในเวลาจริง (Real Time) ในขณะที่ดาวเทียมโคจรผ่านพื้นที่นั้นๆ โดยสามารถถ่ายภาพมุมกว้างได้ 2,700 กิโลเมตร
4. ดาวเทียมเพื่อการนำร่อง Global Positioning System "GPS" เป็นระบบบอกตำแหน่งพิกัดภูมิศาสตร์บนพื้นโลก ซึ่งประกอบด้วยเครือข่ายดาวเทียมจำนวน 32 ดวง โคจรรอบโลกในทิศทางต่างๆ ที่ระยะสูง 20,000 กิโลเมตรส่งสัญญาณมาบนโลกพร้อมๆ กัน แต่เนื่องจากดาวเทียมแต่ละดวงอยู่ห่างจากเครื่องรับบนพื้นโลกไม่เท่ากัน เครื่องรับจึงได้รับสัญญาณจากดาวเทียมแต่ละดวงไม่พร้อมกัน วงจรอิเล็กทรอนิกส์ในเครื่องรับ GPS นำค่าเวลาที่แตกต่างมาคำนวณหาพิกัดภูมิศาสตร์บนพื้นโลก ปัจจุบันเครื่องรับ GPS เป็นที่นิยมใช้กันในหมู่นักเดินทางมีทั้งแบบมือถือ ติดตั้งบนรถ เรือ และเครื่องบิน
5. ดาวเทียมโทรคมนาคม เช่น Intelsat, Thaicom ส่วนใหญ่เป็นดาวเทียมวงโคจรค้างฟ้า (Geo-stationary Orbit) เพื่อถ่ายทอดสัญญาณจากทวีปหนึ่งไปยังอีกทวีปหนึ่ง ข้ามส่วนโค้งของโลก ดาวเทียมค้างฟ้า 1 ดวง สามารถ ส่งสัญญาณครอบคลุมพื้นที่การติดต่อประมาณ 1/3 ของผิวโลก และถ้าจะให้ครอบคลุมพื้นที่ทั่วโลก จะต้องใช้ดาวเทียมในวงโคจรนี้อย่างน้อย 3 ดวง อย่างไรก็ตามดาวเทียมวงโคจรค้างฟ้าจะลอยอยู่ในแนวเส้นศูนย์สูตรโลกเท่านั้น ดังนั้นสัญญาณจะไม่สามารถครอบคลุมบริเวณขั้วโลกได้เลย
6. ดาวเทียมภารกิจพิเศษ นอกจากดาวเทียมทั่วไปที่ใช้งานเกี่ยวข้องกับชีวิตประจำวันตามที่กล่าวไปแล้ว ยังมีดาวเทียมอีกหลายชนิดที่ส่งขึ้นไปเพื่อปฏิบัติภารกิจพิเศษเฉพาะทาง เช่น ดาวเทียมเพื่อการวิจัยทางวิทยาศาสตร์ กล้องโทรทรรศน์อวกาศ ดาวเทียมจารกรรม ดาวเทียมทางทหาร ดาวเทียมประเภทนี้มีระยะสูงและรูปแบบของ วงโคจรต่างๆ กันขึ้นอยู่กับวัตถุประสงค์ของการใช้งาน
สำหรับประเทศไทยในช่วงยุคแรกยังไม่มีดาวเทียมเป็นของตนเองจึงเป็นการเช่าสัญญาณดาวเทียมจากดาวเทียมอินเทลแซท ขององค์การอินเทลแซท (Intelsat: International Telecommunication Satellite Consortium) เพื่อใช้สำหรับการสื่อสารโทรคมนาคมกับสถานีดาวเทียมภาคพื้นดินประเทศอื่นๆ จึงทำให้คนไทยได้มีโอกาสรู้จักคำว่า “ถ่ายทอดสดผ่านดาวเทียม” ต่อมาในปี พ.ศ. 2526 ประเทศไทยได้จัดตั้งโครงการดาวเทียมไทยคมเพื่อศึกษาหาความเป็นไปได้ ที่ประเทศไทยจะมีดาวเทียมใช้เอง จนกระทั่งในปี พ.ศ. 2536 ดาวเทียมสื่อสารดวงแรกของประเทศไทยได้ถูกปล่อยขึ้น สู่อวกาศ จากฐานยิงจรวดเอเรียนสเปซ เมืองคูรู ประเทศฝรั่งเศส ดาวเทียมดวงแรกของไทยนี้มีชื่อว่า ไทยคม1
ปัจจุบันประเทศไทยใช้งานดาวเทียมใน 3 ประเภท คือ
- ดาวเทียมสำหรับสื่อสารโทรคมนาคม ได้แก่ ดาวเทียมไทยคม ที่มีการแบ่งรุ่นของดาวเทียมเป็น ดังนี้ ไทยคม 1 ไทยคม 2 ไทยคม 3 ไทยคม 4 ไทยคม 5 ไทยคม 6 และไทยคม 7
โดยดาวเทียมไทยคมดังที่กล่าวข้างต้นนี้ เป็นดาวเทียมสื่อสารที่ใช้เพื่อรองรับความต้องการใช้งานของการรับ-ส่งสัญญาณรายการโทรทัศน์โดยตรงจากดาวเทียมสู่ผู้ชมตามบ้านเรือน หรือ Digital Direct To Home: DTH บนคลื่นความถี่แบบKu Band ที่มีความที่ระหว่าง 12-18 GHz ที่นอกจากจะให้บริการ DTH แล้วยังสามารถให้บริการอินเทอร์เน็ตผ่านดาวเทียม ช่วยให้ผู้ใช้อินเทอร์เน็ตสามารถรับภาพ ข้อมูล เสียง และเว็บเพจ ไปจนถึงข้อมูลมัลติมีเดียที่มีขนาดใหญ่ ผ่านเครือข่ายดาวเทียมถึงผู้ใช้อินเทอร์เน็ตโดยตรง และคลื่นความถี่ C Band ที่มีความถี่ 4-8 GHz เหมาะกับการสื่อสารโทรคมนาคม ภาพและเสียงทั่วไป แต่มีรัศมีครอบคลุมกว้างกว่า Ku Band
- ดาวเทียมสำหรับสำรวจทรัพยากรที่ประเทศไทยใช้งานมีอยู่ 2 ลักษณะ
1. EO หรือ Electro-optical censoring สามารถเปรียบเทียบการทำงานได้กับการมองเห็นของมนุษย์ ซึ่งต้องอาศัยการสะท้อนแสง หรือการเปล่งพลังงานคลื่นออกมาจากวัตถุเป้าหมาย (Target) พลังงานที่ออกมาจากวัตถุจะผ่านตัวกลาง เช่นบรรยากาศ (Atmosphere) แล้วตกลงที่เลนส์รับภาพ (Optical Receiver) เพื่อรวบรวมพลังงานไปให้ตัวตรวจจับ (Detector) และผลิตสัญญาณให้กับชุดประมวลผล (Signal Processing) ผลลัพธ์ที่ได้จะถูกนำไปใช้งานในอุปกรณ์ต่าง ๆ (Output Device) ได้แก่ การแสดงภาพ เป็นต้น ส่วนมากที่ประเทศไทยมีใช้อยู่จะเป็นลักษณะนี้ทั้งสิ้น
2. SAR หรือ Synthetic aperture radar เป็นดาวเทียมที่มีขีดความสามารถในการทะลุทะลวงลงไปยังพื้นที่ต่างได้ดีพอสมควร โดยเฉพาะอย่างยิ่งถ้าเป็นพื้นที่ที่ปกคลุมด้วยต้นไม้ ป่าไม้ ก็สามารถจะถ่ายทางเครื่องบินและสามารถที่จะแยกแยะปัจจัยบนผิวดินได้
ซึ่งตัวอย่างของดาวเทียมสำรวจทรัพยากร ได้แก่ ดาวเทียม THEOS หรือดาวเทียมไทยโชต ดาวเทียมแลนด์แซท-5 (LANDSAT-5) ดาวเทียม IRS-I C, D และดาวเทียม RADARSAT-1 ดาวเทียมเหล่านี้ประเทศไทยได้มีการนำข้อมูลมาใช้ประโยชน์ เช่น ศึกษาพื้นที่ป่าไม้ทั่วประเทศ ศึกษาหาพื้นที่เพาะปลูกของพืชเศรษฐกิจที่สำคัญ ศึกษาการเปลี่ยนแปลงการใช้ประโยชน์ที่ดิน การจัดทำแผนที่ภูมิประเทศ ศึกษาแหล่งน้ำทั้งบนบก ในทะเล น้ำบนดินและใต้ผิวดิน ใช้สำรวจทรัพยากรน้ำและปริมาณทรัพยากรที่อยู่ในน้ำ ศึกษาเกี่ยวกับการไหลเวียนของน้ำทะเล ช่วยในการติดตามและประเมินผลเสียหายเบื้องต้นเกี่ยวกับอุบัติภัยต่างๆ รวมทั้งภาพจากดาวเทียมเป็นภาพที่ทันสมัยที่สุดสามารถนำไปแก้ไขแผนที่ภูมิประเทศมาตราส่วนใหญ่ 1: 50,000 ได้อย่างรวดเร็วมีความถูกต้องเป็นที่ยอมรับ ทำให้ทราบลักษณะภูมิประเทศที่เปลี่ยนแปลงไป ตลอดจนเส้นทางคมนาคมหรือสิ่งก่อสร้างขึ้นใหม่ ทำให้ได้แผนที่ที่ทันสมัยเพื่อการวางแผนที่รวดเร็วและถูกต้องยิ่งขึ้น
- ดาวเทียมสำหรับอุตุนิยมวิทยา ได้แก่ ดาวเทียม NOAA ดาวเทียม GOES และดาวเทียม MTSAT ดาวเทียมประเภทนี้นำมาใช้ประโยชน์ในแง่ของการพยากรณ์อากาศ การตรวจวัดสิ่งผิดปรกติเกี่ยวกับสภาพภูมิอากาศ โดยจะทำการถ่ายภาพก้อนเมฆที่ปกคลุมโลก ติดตามการก่อตัวและเคลื่อนตัวของพายุ การโคจรของดาวเทียมอุตุนิยมวิทยา จะมีอยู่สองลักษณะโดยจะมีทั้งประเภทโคจรแบบวงโคจรค้างฟ้า โดยจะทำหน้าที่ถ่ายภาพก้อนเมฆและส่งภาพกลับมาเพื่อประมวลผลเกี่ยวกับสภาพภูมิอากาศ ทั้งดาวเทียมประเภทนี้ยังมีการโคจรแบบวงกลมอีกด้วย โดยจะเคลื่อนที่ผ่านจุดเดิมวันละ 2 ครั้ง เพื่อทำหน้าที่ถ่ายภาพคลื่นแม่เหล็กไฟฟ้าที่สะท้อนออกมาจากผิวโลกเพื่อนำไปใช้ในการตรวจวัดระดับไอน้ำในชั้นบรรยากาศ โดยดาวเทียมสำหรับอุตุนิยมวิทยานี้จะมีฐานรับรับสัญญาณอย่างเดียว ซึ่งตั้งอยู่ที่ลาดกระบัง
จากที่กล่าวมาข้างต้นเกี่ยวกับดาวเทียมประเภทต่างๆ ที่ประเทศไทยมีการใช้งานอยู่นั้น ดาวเทียมดวงหนึ่งที่เป็นความภาคภูมิใจของคนไทยนั่นก็คือ ดาวเทียม THEOS หรือ ดาวเทียมไทยโชต ซึ่งเป็นดาวเทียมสำหรับสำรวจทรัพยากรธรรมชาติที่เป็นของตนเองและสามารถให้บริการข้อมูลดาวเทียม THEOS แกผู้ใช้ทั่วโลก โดยดาวเทียมไทยโชตนี้ถูกพัฒนาขึ้นภายใต้ความร่วมมือระหว่างที่เกิดขึ้นจากความร่วมมือด้านเทคโนโลยีอวกาศระหว่างรัฐบาลไทยและรัฐบาลฝรั่งเศส โดยมีสำนักงานพัฒนาเทคโนโลยี อวกาศและภูมิ สารสนเทศ(องค์การมหาชน) หรือ สทอภ. ทำหน้าที่เป็นหน่วยงานกลางในการดำเนินโครงการดาวเทียมสำรวจทรัพยากร THEOS ที่จะส่งผลให้คนไทยไดมีโอกาสนำข้อมูลไปใช้ประโยชนในด้านต่างๆ อาทิ การทำแผนที่ , การเกษตร, การใช้ที่ดิน, ป่าไม้, การวางผังเมือง, สภาพแวดล้อม, อุทกภัย, ความมั่นคงของประเทศ เป็นต้น ซึ่งจะเป็นการเสริมสร้างศักยภาพการพัฒนาเศรษฐกิจและสังคมของประเทศอย่างยั่งยืน
ดาวเทียม THEOS หรือดาวเทียมไทยโชต ได้ทะยานขึ้นสู่อวกาศ ในวันพุธที่ 1 ตุลาคม พ.ศ.2551 โดยจรวดนำส่ง "เนปเปอร์" (Dnepr) จากฐานส่งจรวดเมืองยาสนี (Yasny) ประเทศรัสเซีย โดยดาวเทียม THEOS ถูกออกแบบให้เป็นดาวเทียมขนาดเล็ก มีน้ำหนัก 750 กิโลกรัม มีวงโคจรสูงจากพื้นโลก 820 กิโลเมตร โคจรรอบโลกทุก 26 วัน มีอายุการใช้งานอย่างน้อย 5 ปี ทำงานโดยอาศัยแหล่งพลังงานจากดวงอาทิตย์ สามารถบันทึกภาพได้ครอบคลุมพื้นที่ทั่วโลก ในด้านของระบบการถ่ายภาพนั้น ดาวเทียม THEOS มีระบบการถ่ายภาพแบบ Electro-optical censoring ซึ่งติดตั้งอุปกรณ์ถ่ายภาพแบบออฟติคคอล (Optical Imagery) ทำให้สามารถบันทึกข้อมูลภาพ ในช่วงคลื่นแสง ที่ตามองเห็น (Visible band) จนถึงช่วงคลื่นอินฟราเรดใกล้ (Near Infrared) ที่เกิดจากการสะท้อนพลังงานแสงอาทิตย์เมื่อตกกระทบวัตถุบนพื้นผิวโลก โดยความละเอียดในการบันทึกภาพชัดเจนในพื้นที่ขนาด 2 และ15 ตารางกิโลเมตร และมีรายละเอียดของภาพขาว-ดำ (Panchromatic) 2 เมตร ความกว้างแนวถ่ายภาพ 22 กิโลเมตร ส่วนภาพสี (Multi-Spectral) 4 ช่วงคลื่น รายละเอียดภาพ 15 เมตร แต่ละภาพมีความกว้างของแนวถ่ายภาพ 90 กิโลเมตร
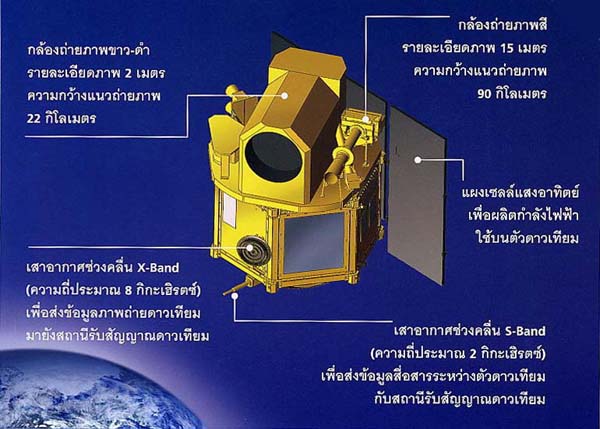
ภาพแสดงส่วนประกอบของดาวเทียม THEOS
ที่มา : http://www.gistda.or.th/main/th/node/90
ดาวเทียม THEOS มีหลักการทำงานแบ่งได้เป็น 2 ส่วน คือ
1. ส่วนของ Payload จะทำหน้าที่ในการถ่ายภาพ ซึ่งประกอบด้วยกล้องถ่ายภาพขาวดำ กล้องถ่ายภาพสี และอุปกรณ์อิเล็กทรอนิกส์ที่เกี่ยวข้องกับการจัดการสัญญาณภาพทั้งการแปลงสัญญาณ การบีบอัด และแปลงรูปแบบการจัดเก็บและส่งข้อมูลภาพ ซึ่งในส่วน Payload ของดาวเทียม THEOS นั้นจะมีข้อจำกัดใน บางประการ ได้แก่ จะถ่ายได้ภาพที่ชัดเจนเมื่อขณะฟ้าโปร่ง เนื่องจากหากมีเมฆมาบดบังจะส่งผลให้ภาพที่ถ่ายจากดาวเทียมจะไม่สามารถถ่ายภาพทะลุผ่านก้อนเมฆลงมาได้ เป็นต้น
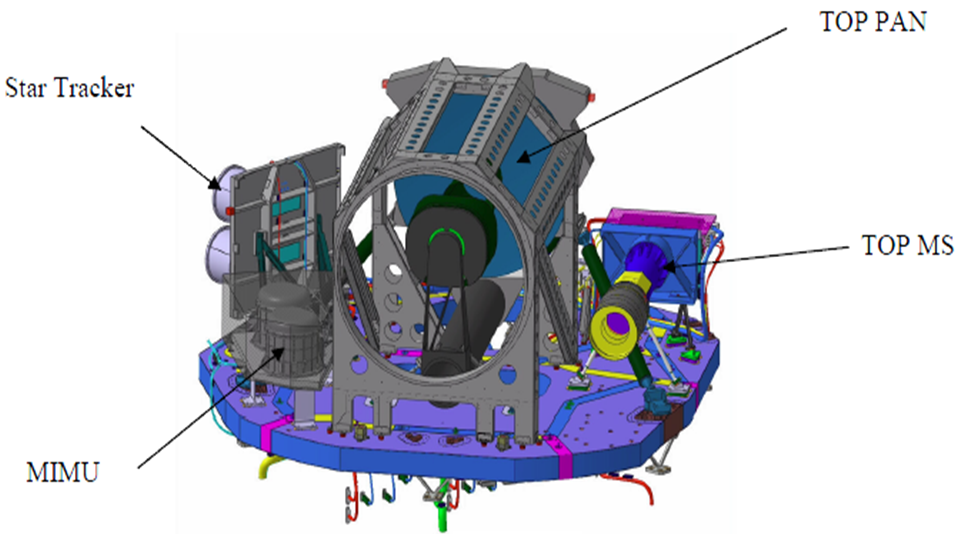
ภาพแสดงส่วนประกอบการทำงานของดาวเทียม THEOS ในส่วนของ Payload
ที่มา : สำนักงานพัฒนาเทคโนโลยีอวกาศและภูมิสารสนเทศ (องค์การมหาชน)
2. ส่วนของ Bus จะทำหน้าที่เป็นสนับสนุนการทำงานของ Payload ซึ่งระบบย่อยของ BUS ดาวเทียม มีดังนี้
2.1 ระบบจัดการข้อมูลของ Payload ทำหน้าที่จัดเก็บภาพถ่ายดาวเทียมชั่วคราว ปรับความถี่เพื่อส่งสัญญาณและส่งข้อมูลภาพถ่ายกลับสู่สถานีภาคพื้นดิน
2.2 ระบบติดต่อสื่อสาร ทำหน้าที่ เชื่อมโยงดาวเทียมกับสถานีควบคุมภาคพื้นดิน และเชื่อมโยงระหว่างดาวเทียมด้วยกัน ข้อมูลต่างๆที่ส่งขึ้นไปจากสถานีควบคุมภาคพื้นดินสูดาวเทียม คือคำสั่งการทำงานของดาวเทียม ส่วนข้อมูลต่างๆ ที่ดาวเทียมส่งมายังสถานีภาคพื้นดินนั้นเป็นข้อมูลแสดงสถานภาพของดาวเทียมและข้อมูลจาก Payload
2.3 ระบบไฟฟ้าและระบบเชื้อเพลิง ระบบไฟฟ้าทำหน้าที่เป็นแหล่งจ่ายพลังงานไฟฟ้าให้กับดาวเทียม ในส่วนของ Payload และ Bus รวมทั้งกำเนิดพลังงานไฟฟ้าโดยแผงเซลล์แสงอาทิตย์ ซึ่งส่วนกำเนิดพลังงานไฟฟ้านี้เองจะช่วยในเรื่องของการปรับระดับกำลังไฟฟ้าให้เพียงพอต่อการใช้งานภายในระบบดาวเทียม ระบบไฟฟ้าต้นกำลังประกอบด้วย 3 ส่วนหลัก คือ
2.3.1 อุปกรณ์กำเนิดพลังงาน คือแผง Solar Cell ทำหน้าที่เปลี่ยนพลังงานจากแสงอาทิตย์มาเป็นพลังงานไฟฟ้า
2.3.2 อุปกรณ์สะสมพลังงาน คือ แบตเตอรี่ ดาวเทียมจะหมดอายุการใช้งานทันที่ระบบไฟฟ้า
ต้นกำลังไม่ทำงาน ซึ่งจะมีผลกระทบต่อการระบบการสื่อสาร Payload และ Bus
2.3.3 อุปกรณ์แปลงพลังงาน
ส่วนระบบเชื้อเพลิงที่ใช้กับดาวเทียม คือ Hydrazine ซึ่งใช้เป็นเชื้อเพลิงระบบขับดันขนาดใหญ่ที่ใช้ในการเพิ่มหรือลดความเร็วของดาวเทียมเพื่อเปลี่ยนวงโคจร ส่วนแก็สอัดจะใช้ในการควบคุมการทรงตัวและปรับขนาดวงโคจร และเมื่อดาวเทียมใดๆ ก็ตามหากหมดเชื้อเพลิงก็จะถูกกำจัดด้วยดังนี้คือ
- หากเป็นเป็นดาวเทียมที่อยู่ในวงโคจรระดับต่ำ จะถูกป้อนคำสั่งให้ลดระดับลงเพื่อให้ลงมาในระดับชั้นบรรยากาศจนเกิดการเผาไหม้และสลายไป
- หากเป็นเป็นดาวเทียมที่อยู่ในวงโคจรระดับสูง จะถูกป้อนคำสั่งให้เพิ่มความสูงจนเลยระดับของทุกวงโคจรเพื่อที่จะดีดดาวเทียมนั้นไปสู่ชั้นของขยะอวกาศ
2.4 ระบบการจัดการข้อมูลและคำสั่ง ทำหน้าที่แปลงหรือถอดรหัสสัญญาณที่ส่งมาจากสถานควบคุม
ภาคพื้นดิน และกระจายคำสั่งที่ได้รับนั้นไปสู่อุปกรณ์หรือ Payload ที่เกี่ยวข้อง และทำหน้าที่รับและบันทึกข้อมูลดาวเทียมจาก Payload แปลงและเข้ารหัสสัญญาณและทำการส่งข้อมูลดังกล่าวลงมาสู่สถานีภาคพื้นดิน ในระบบจัดการข้อมูลบนดาวเทียมนั้นจะใช้ระบบ Computer เป็นหลัก
2.5 ระบบควบคุมความร้อน ทำหน้าที่รักษาระดับอุณหภูมิในตัวดาวเทียมและ Payload ให้อยู่ใน ระดับที่เหมาะสม การควบคุมความร้อนทำได้หลายแบบ เช่นการหุ้มด้วยฉนวนกันรังสีความร้อน และการใช้อุปกรณ์ถ่ายเทความร้อนจากด้านที่ร้อนไปยังด้านที่เย็นกว่า (จากด้านที่หันเข้าหาดวงอาทิตย์ไปยังด้านอวกาศ) โดยดาวเทียม THEOS จะใช้ฉนวนสีทองหุ้มดาวเทียมไว้เพื่อกันความร้อนจากดวงอาทิตย์
2.6 ระบบขับดันและระบบควบคุมการวางตัว ทำหน้าที่สร้างแรงขับดันเพื่อใช้ในการเปลี่ยนลักษณะวงโคจร และการควบคุมการทรงตัว เพื่อให้ตำแหน่งดาวเทียมเป็นไปตามทิศทางที่ต้องการหรือที่ได้กำหนดไว้ โดยเฉพาะในเรื่องการควบคุมให้ Payload หันไปในทิศทางที่ต้องการ ซึ่งประกอบด้วย หัวฉีด อุปกรณ์ควบคุม และระบบเชื้อเพลิง
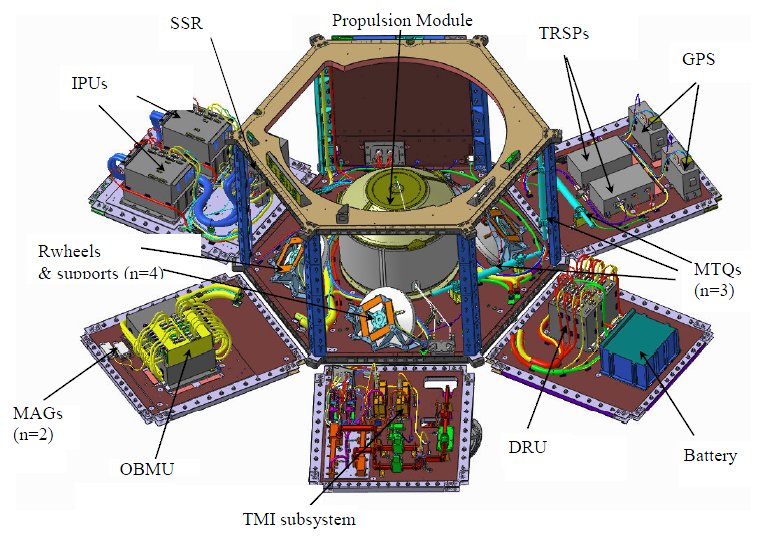
ภาพแสดงส่วนประกอบการทำงานของดาวเทียม THEOS ในส่วนของ Bus
ที่มา : สำนักงานพัฒนาเทคโนโลยีอวกาศและภูมิสารสนเทศ (องค์การมหาชน)
ดาวเทียม THEOS นี้เป็นดาวเทียมที่ประเทศไทยควบคุมเอง โดยผ่านการควบคุมจากสถานีควบคุมดาวเทียม THEOS อยู่ที่ อ.ศรีราชา จ.ชลบุรี โดยระบบควบคุมดาวเทียม THEOS (Control Ground Segment : CGS) มีภารกิจหลัก คือ การติดตามดาวเทียม THEOS ในตำแหน่งที่ถูกต้อง การตรวจจับสถานะภาพการทำงานของระบบต่างๆ ของดาวเทียม THEOS เพื่อเช็คสภาพให้ดาวเทียมพร้อมที่จะสามารถทำงานตามฟังก์ชันที่ต้องการได้ หรือหากมีปัญหาในระบบย่อยใดๆ ก็สามารถที่จะส่งคำสั่งเพื่อการแก้ไขได้ทันที รวมทั้งเป็นศูนย์รวมรับข้อมูลความต้องการของผู้ใช้เพื่อทำการแปลงเป็นคำสั่งและส่งให้ดาวเทียม THEOS ต่อไป
วีดิทัศน์ เรื่องดาวเทียมของไทย
กลับไปที่เนื้อหา
การควบคุมดาวเทียม THEOS จะมีระบบย่อยภายในระบบควบคุมดาวเทียม ประกอบไปด้วย 4 ส่วนหลัก คือ
1. Satellite Control Center - SCC มีหน้าที่ Monitor สถานภาพการทำงานของดาวเทียม ติดต่อกับดาวเทียมในช่วงแต่ละวันที่ดาวเทียมโคจรผ่านสถานี เตรียมคำสั่งเพื่อสั่งให้ดาวเทียมทำงานตามที่ต้องการ ส่งคำสั่งที่เตรียม และรับข้อมูลเพื่อนำมาวิเคราะห์สถานะภาพการทำงานของดาวเทียม
2. Flight Dynamic System - FDS มีหน้าที่ใช้ข้อมูลทาง GPS เพื่อคำนวณหาวงโคจร และตำแหน่ง ของดาวเทียม THEOS ที่แม่นยำ เพื่อส่งต่อให้กับส่วนการทำงานอื่นๆ เช่น ส่วนการจานดาวเทียมเพื่อการ Tracking ตรวจสอบและคำนวณตำแหน่งเพื่อการปรับแก้วงโคจรของดาวเทียมให้ถูกต้อง
3. Mission Planning Center - MPC มีหน้าที่ รวบรวมข้อมูลความต้องการภาพถ่ายของผู้ใช้ในแต่ละวันทั้งหมด เพื่อนำไปคำนวณเป็นแผนการถ่ายภาพสำหรับดาวเทียม คำนวณลำดับการถ่ายภาพที่เหมาะสม เพื่อใช้งานดาวเทียมได้อย่างคุ้มค่าที่สุด
4. S-band Station มีหน้าที่รับสัญญาณและส่งสัญญาณ เพื่อการติดต่อกับดาวเทียม ในช่วงคลื่น Visibility เป็นเสมือน Gate way ระหว่างสถานีควบคุมภาคพื้นดินกับดาวเทียม THEOS จานรับสัญญาณดาวเทียมระบบ X-Band จะมีขนาดเส้นผ่าศูนย์กลาง 13 เมตร และจานส่งสัญญาณดาวเทียมระบบ S-Band มีขนาดเส้นผ่าศูนย์กลาง 4.5 เมตร
การโคจรของดาวเทียม THEOS ซึ่งเป็นดาวเทียมสำรวจทรัพยากรธรรมชาติ มีการโคจรแบบสัมพันธ์กับดวงอาทิตย์ (Sun Synchronous) การโคจรแบบนี้ดาวเทียมจะโคจรในแนวเหนือและใต้ของขั้วโลกโดยอยู่สูงจากพื้นโลกประมาณ 830 กิโลเมตร และในการโคจรของดาวเทียม THEOS รอบโลก 1 รอบใช้เวลา 101.46 นาที และการโคจรกลับมาซ้ำรอบวงโคจรเดิม (Cycle) ใช้เวลา 26 วัน ดังภาพ
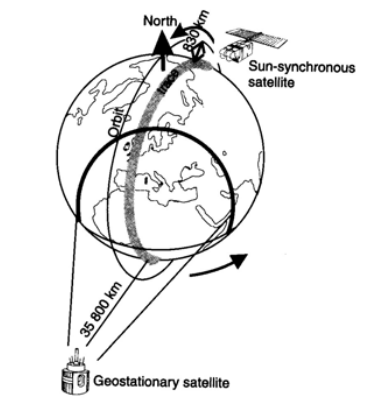
ภาพแสดงวิถีการโคจรของดาวเทียมแบบ Sun Synchronous
ที่มา : http://www.kmitl.ac.th/jkmitl/vol15no3/03.pdf
จากการโคจรดังกล่าวจึงทำให้ดาวเทียม THEOS ต่างจากดาวเทียมค้างฟ้า เพราะดาวเทียมค้างฟ้า จะมีทิศทางการโคจรทวนเข็มนาฬิกาเหมือนทิศทางการหมุนของโลก และดาวเทียมค้างฟ้า เป็นดาวเทียมที่ลอยอยู่บนท้องฟ้า ทำหน้าที่ขยายและทบทวนสัญญาณข้อมูล รับและส่งสัญญาณข้อมูลกับสถานีดาวเทียมที่อยู่บนพื้นโลก ดาวเทียมจะหมุนไปตามการหมุนของโลกซึ่งมีตำแหน่งคงที่เมื่อเทียบกับตำแหน่งบนพื้นโลก ดาวเทียมจะถูกส่งขึ้นไปให้ลอยอยู่สูงจากพื้นโลกประมาณ 23,300 กม.
ดาวเทียม THEOS เมื่ออยู่ในอวกาศ ก็จะมีการโคจรร่วมกับสิ่งต่างๆ มากมาย อาทิเช่น สะเก็ดดาวดาวเคราะห์ต่างๆ และวัตถุในอวกาศ จึงทำให้ต้องมีการทำงานร่วมกับนานาประเทศในการรับข้อมูลข่าวสารเพื่อรับการแจ้งเตือนล่วงหน้าหากมีวัตถุในอวกาศหลุดเข้ามาสู่วงโคจรของดาวเทียม THEOS ซึ่งภายหลังจากที่ได้รับข้อมูลการแจ้งเตือนแล้วทางสถานีควบคุมจะทำการป้อนคำสั่งควบคุมดาวเทียม THEOS ให้หลีกเลี่ยงวัตถุในอวกาศดังกล่าว โดยการควบคุมดาวเทียมนี้มีทั้งที่เป็นการทำงานแบบ Online และแบบ Offline โดยการทำงานแบบ Online คือการที่ข้อมูลของภาพถ่ายถูกส่งมายังสถานีภาคพื้นในทันทีขณะที่ดาวเทียมเคลื่อนที่ผ่านยังจุดที่ต้องการ ส่วนการทำงานแบบ Offline คือ ภาพถ่ายที่ดาวเทียมบันทึกได้จะถูกบันทึกไว้ที่หน่วยความจำ และข้อมูลดังกล่าวทางสถานีภาคพื้นจะดึงมาใช้ในภายหลัง
จากที่กล่าวมาข้างต้นจะกล่าวถึงระบบควบคุมดาวเทียม แต่ถ้าหากกล่าวถึงการทำงานของระบบดาวเทียม THEOSระบบดาวเทียมธีออส ประกอบไปด้วย 2 ส่วนหลัก ๆ ได้แก่ ส่วนอวกาศ (Space Segment)และส่วนภาคพื้นดิน (Ground Segment) ซึ่งในส่วนของการทำงานของภาคพื้นดิน จะประกอบไปด้วยการทำงานหลักๆ ดังนี้
1.ส่วนควบคุมภาคพื้นดิน (Control Ground Segment ; CGS)
2. ส่วนรับและประมวลผลภาพภาคพื้นดิน (Image Ground Segment ; IGS)
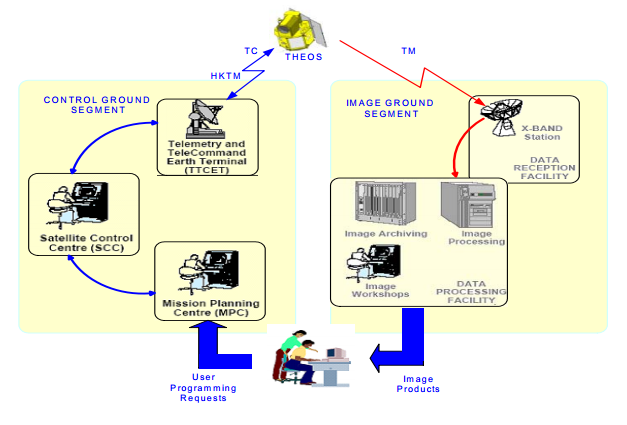
ภาพแสดงการทำงานในส่วนของภาคพื้นดิน (Ground Segment)
1. ส่วนควบคุมภาคพื้นดิน ( Control Ground Segment ; CGS )ประกอบไปด้วย 3 ส่วนดังนี้
1.1 ศูนย์วางแผนการถ่ายภาพ( Mission Planning Center ; MPC) เป็นศูนย์จัดการเรื่องการร้อง ขอใช้บริการข้อมูล เพื่อจัดทำเป็นแผนการใช้งานอุปกรณ์การถ่ายภาพ (Payload Programming Plan) โดยพิจารณากำหนดอุปกรณ์และมุมการถ่ายภาพและข้อมูลอื่นๆ ที่อาจเป็นข้อจำกัดในการถ่ายภาพ เช่น ข้อมูลอุตุนิยมวิทยา, ความสามารถการบันทึกภาพบนตัวดาวเทียม, ช่วงเวลาในการส่งสัญญาณข้อมูลให้กับสถานีรับ และแผนการถ่ายภาพ (Payload Work Plan) จะมีการกำหนดเป็นประจำวัน และถูกส่งให้กับศูนย์ควบคุมดาวเทียม (Satellite Control Center) เพื่อแปลงเป็น “ คำสั่ง “ ( Telecommand ) ส่งสัญญาณผ่านสถานีส่ง (S-band Station) ไปยังดาวเทียมส่วนตารางเวลาการรับภาพและไฟล์ข้อมูลเส้นทางโคจรของดาวเทียม (Pass file) จะถูกส่งให้กับสถานีรับ ( X-band Station ) เพื่อเตรียมปรับจานรับสัญญาณดาวเทียม ในการรับสัญญาณข้อมูลกำหนดเป็นประจำวัน และถูกส่งให้กับศูนย์ควบคุมดาวเทียม (Satellite Control Center) เพื่อแปลงเป็น“ คำสั่ง “ ( Telecommand ) ส่งสัญญาณผ่านสถานีส่ง (S-band Station) ไปยังดาวเทียมส่วนตารางเวลาการรับภาพและไฟล์ข้อมูลเส้นทางโคจรของดาวเทียม( Pass file) จะถูกส่งให้กับสถานีรับ ( X-band Station ) เพื่อเตรียมปรับจานรับสัญญาณดาวเทียม ในการรับสัญญาณข้อมูล
1.2 ศูนย์ควบคุมดาวเทียม (Satellite Control Center ; SCC) ทำหน้าที่ในการเฝ้าระวังและควบคุมดาวเทียมตั้งแต่เริ่มปล่อยจากพื้นโลก จนถึงช่วงเข้าสู่วงโคจรทั้งในสภาวะปกติและในช่วงที่มีเหตุฉุกเฉิน โดยการจัดการและประมวลผลข้อมูลสถานะของดาวเทียม (Housekeeping Telemetry) เพื่อประเมินสถานะและการทำงานของตัวดาวเทียมรวมทั้งจัดเตรียมตรวจสอบ ส่งสัญญาณคำสั่ง (Telecommand) แผนการทำงานของทั้งตัวดาวเทียม และอุปกรณ์ถ่ายภาพซึ่งได้รับมาจาก MPC (ศูนย์วางแผนการถ่ายภาพ)
1.3 ระบบควบคุมวงโคจร ( Flight Dynamics System ; FDS) ทำหน้าที่ควบคุมวงโคจร ดาวเทียม ( Orbit Determination and Orbit Prediction ) แล้วนำค่ามุมภาค ( Azimuth ) และ มุมเงย ( Elevation ) ที่ได้จากการคำนวณแนวการโคจรของดาวเทียมจากระบบส่งให้กับสถานีรับสัญญาณข้อมูล เพื่อใช้ในการปรับจานรับสัญญาณดาวเทียม (Tracking Antenna) รวมถึงคำนวณค่าความเร็ว และตำแหน่งที่จะต้องปรับดาวเทียมเพื่อให้ได้วงโคจรตามที่ต้องการ หรือที่ควรจะเป็น (Orbit Maneuvers)
2. ส่วนรับและประมวลผลภาพภาคพื้นดิน( Image Ground Segment ; IGS )กระบวนการรับสัญญาณและประมวลผลข้อมูลภาพถ่ายดาวเทียม สามารถแบ่งเป็นขั้นตอนได้ 4 ขั้นตอนย่อยตามลำดับหน้าที่ ดังนี้
2.1 สถานีรับภาพ ( Image Receiving Station) ทำหน้าที่รับสัญญาณข้อมูลภาพโดยสถานีรับสัญญาณ ( X-band Station) ซึ่งมีการควบคุมทิศทางของจานรับสัญญาณดาวเทียม (Antenna ) ให้เคลื่อนที่หันตามดาวเทียม ในระหว่างที่รับสัญญาณข้อมูลและสัญญาณดังกล่าวจะถูกขยายให้มีกำลังแรงขึ้นโดยอุปกรณ์ขยายสัญญาณที่เรียกว่า Low Noise Amplifier แล้วลดความถี่ของสัญญาณข้อมูล และทำการแปลงสัญญาณที่อยู่ในรูปของคลื่นวิทยุให้เป็นสัญญาณข้อมูลแบบดิจิตอล ( ECL Bit Stream ) เพื่อส่งให้กับหน่วยประมวลผลข้อมูลต่อไป
2.2 การประมวลผลภาพ (Image Processing) หลังจากได้รับสัญญาณข้อมูลดิจิตอลจากสถานีรับ แล้วระบบจะทำการประมวลผลข้อมูล เพื่อให้ได้ข้อมูลภาพตามความต้องการของผู้ใช้บริการ ข้อมูลโดยมีขั้นตอน คือ ขั้นตอนการแปลงสัญญาณดิจิทัลเป็นข้อมูลภาพ และทำการบันทึกลงเทปบันทึกข้อมูล ( Ingestion), แสดงภาพขณะที่ ทำการรับสัญญาณ ( Moving Window Player) ซึ่งช่วยให้พนักงานสามารถตรวจสอบข้อมูลภาพได้ในเบื้องต้น,ขั้นการจัดเก็บข้อมูลดิบของภาพในระบบฐานข้อมูล (Archiving) ขั้นการจัดทำเป็นแคตาลอก (Catalogue) สําหรับผู้ใช้บริการ ข้อมูลในการสืบค้นและตรวจสอบว่ามีภาพตามความต้องการอยู่ในฐานข้อมูลหรือไม่ และขั้นการประมวลผลและปรับแก้ข้อมูล (Processing) เพื่อให้มีคุณภาพข้อมูลตามระดับความต้องการของผู้ใช้บริการ โดยต้องมีการปรับแก้ความเพี้ยนของสัญญาณ ( radiometric correction) และความเพี้ยนของภาพ ( geometric correction )
2.3การตรวจสอบคุณภาพ (Quality Check) คือการตรวจสอบคุณภาพข้อมูลภาพก่อนส่งให้กับลูกค้า
2.4 การพิมพ์และจัดส่งภาพ ( Product Edition and Delivery) คือการจัดพิมพ์ข้อมูลภาพและการจัดส่งให้กับผู้ใช้บริการข้อมูลในรูปแบบที่เหมาะสม เช่น CD-Rom, ภาพพิมพ์สี
วีดิทัศน์ เรื่องวงโคจรดาวเทียมไทยโชต
วีดิทัศน์ เรื่องการควบคุมดาวเทียมไทยโชต
กลับไปที่เนื้อหา
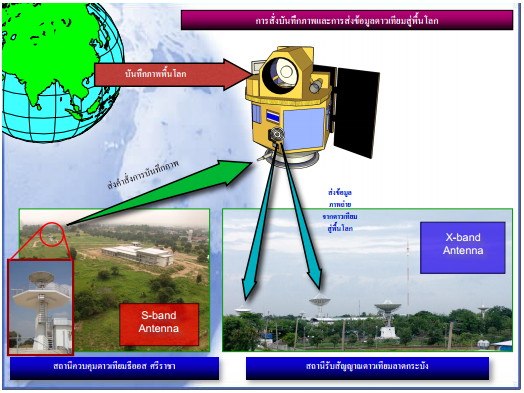
การรับ-ส่งสัญญาณดาวเทียมTHEOSมีหลักการทำงาน คือภาพที่ส่งมาจากดาวเทียมธีออส ตามที่สถานีควบคุมภาคพื้นดินได้สั่งขึ้นไป เมื่อได้ภาพแล้วนำมาผ่านกระบวนการปรับแก้ไขภาพ และเพิ่มมูลค่าของภาพถ่ายดาวเทียมก่อนส่งต่อไปยังผู้ใช้ภาพต่อไปนอกจากนี้การควบคุมและรับสัญญาณจากดาวเทียมธีออส เพื่อถ่ายภาพทรัพยากรธรรมชาติของไทย ทำผ่านการควบคุมโดยวิศวกรจากสถานีควบคุมสัญญาณดาวเทียมธีออส ภาคพื้นดินที่อำเภอศรีราชา จังหวัดชลบุรี
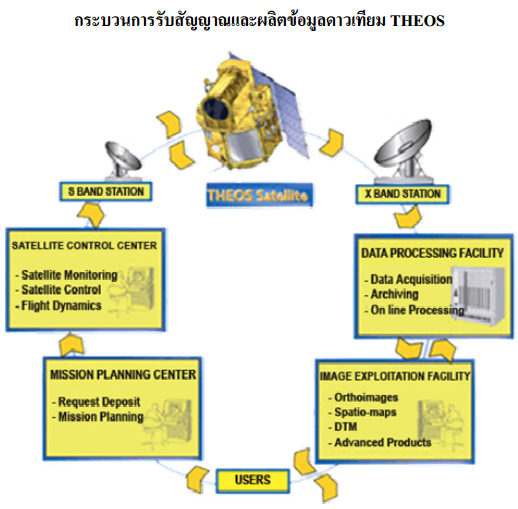
ภาพแสดงกระบวนการรับสัญญาณและผลิตข้อมูลดาวเทียมTHEOS
โดยส่วนที่ต้องมีการควบคุมเพื่อรับสัญญาณดาวเทียม ได้แก่
- ส่วนที่หนึ่งเรียกว่า แซทเทอไลท์ คอนโทรล เซ็นเตอร์ (Satellite Control Center) ทำหน้าที่ส่งคำสั่ง และรับสัญญาณควบคุมดาวเทียม เมื่อดาวเทียมผ่านเข้ามาเหนือสถานีควบคุม ในส่วนนี้มี 2 เชน ที่จะทำงานสลับกัน เมื่อเชนใดเชนหนึ่งเกิดปัญหา คือ เทอร์มินัลเชน (Terminal Chain) และรีดันแด้นท์เชน (Redundant Chain)
- ส่วนที่สองคือ ไดนามิกซิสเต็ม (Dynamic System) ทำหน้าที่วิเคราะห์วงโคจรดาวเทียม ว่าอยู่ในวงโคจรที่กำหนดไว้หรือไม่
- ส่วนที่สามคือ ส่วนวิชั่นไดนิ่งเซ็นเตอร์ ทำหน้าที่วางแผนการปฎิบัติงานดาวเทียมโดยใช้ข้อมูลวงโคจรมาวางแผนการถ่ายภาพ จากนั้นจะอัพโหลดแผนวงโคจรโดยทีมแซทเทอไลท์ คอนโทรล เซ็นเตอร์ (Satellite Control Center) ทีมแซทเทอไลท์ จะทำหน้าที่วิเคราะห์ข้อมูลของดาวเทียมว่าเป็นไปโดยปกติหรือไม่ และตรวจสอบการทำงานของดาวเทียมเมื่อดาวเทียมผ่านเข้าเหนือวงโคจร
- ส่วนที่สี่ส่วนควบคุมจานรับสัญญาณ ทำหน้าที่ควบคุมและตรวจสอบการทำงานของจานรับสัญญาณ S-Band โดยอัตโนมัติ เมื่อดาวเทียมผ่านเข้ามาในวงโคจร และในส่วนของการควบคุมจานรับสัญญาณนี้ สิ่งที่ขาดไม่ได้นั่นก็คือ ระบบจานรับสัญญาณดาวเทียม ซึ่งจะเป็นแบบ Parabolic Reflector และ Dual Band Feed System พร้อมอุปกรณ์สะท้อนสัญญาย่อย (Sub-Reflector) ที่สามารถรับสัญญาณในย่านความถี่ S-Band และการติดตามดาวเทียมแบบ Auto-track และ Program Track ความถี่ในย่าน X-Band ดังนั้นการที่จานรับสัญญาณเป็นแบบ Parabolic Reflector จะช่วยให้การรับสัญญาณดีขึ้นเพราะจานรับสัญญาณแบบนี้ โครงสร้างของจานจะมีลักษณะของส่วนโค้งที่ให้สัญญาณทั้งหมดตกกระทบ แล้วสะท้อนไปยังจุดโฟคัล เหนือจานรับสัญญาณ หากส่วนโค้งของจานมีความถูกต้อง ความแรงของสัญญาณจะถูกส่งไปยังตัวรวมสัญญาณ (Feed Horn) ก็จะมีมากขึ้น
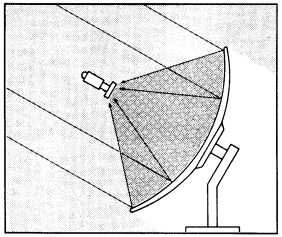
ภาพแสดงการรับสัญญาณดาวเทียมด้วยจานแบบParabolic
วีดิทัศน์ เรื่องการรับสัญญาณดาวเทียมไทยโชต
กลับไปที่เนื้อหา
จากการที่ดาวเทียมมีหน้าที่ รับสัญญาณจากสถานีภาคพื้นดิน และขยายและส่งสัญญาณกลับมายังสถานีภาคพื้นดินนั้น จึงต้องเกี่ยวกับย่านความถี่ของคลื่นที่ดาวเทียมใช้ในการรับ-ส่งสัญญาณ ดาวเทียมแต่ละดวงนั้นเป็นเหมือนสถานีทวนสัญญาณ หรือที่เรียกว่า รีพีทเตอร์(Repeater) ซึ่งติดตั้งอยู่สูงมากถึง 35,786 กิโลเมตร จึงต้องทำหน้าที่เป็นทั้งเครื่องรับและเครื่องส่งเพื่อติดต่อกับสถานีภาคพื้นดิน โดยสถานีภาคพื้นดินจะส่งสัญญาณในช่วง"ขาขึ้น" ที่ความถี่หนึ่งซึ่งเรียกว่า Uplink ไปให้ดาวเทียม เมื่อดาวเทียมได้รับก็จะทำการเปลี่ยนความถี่ ที่รับได้ให้เป็นอีกความถี่หนึ่ง และส่งกลับมาให้สถานีภาคพื้นดินอื่นๆซึ่งสัญญาณที่ส่งลงมาจากดาวเทียมจะเรียกว่า Downlink หรือความถี่ "ขาลง"โดยสัญญาณที่ส่งลงมานี้ สามารถจะครอบคลุมพื้นผิวโลกได้ถึง 40% ของจำนวนพื้นที่โลกทั้งหมด
ITU (International Telecommunication Union) ได้จัดสรรและควบคุมการใช้ความถี่ในกิจการต่างๆ ทั้งในประเทศและระหว่างประเทศเพื่อไม่ให้เกิดการทับซ้อ และรบกวนกันความถี่ที่ใช้กับดาวเทียมจะใช้หลักการเรียกชื่อคล้ายกับที่ใช้ในเรดาร์และไมโครเวฟ แต่ความถี่ใช้งานอาจแตกต่างกันบ้างตามภารกิจ และวิธีการใช้ความถี่ เช่น L-band C-band KU-band X-band และ KA –band เป็นต้น ความถี่ที่นิยมใช้กันมาก คือ ย่าน C-band สัญญาณย่านขาขึ้น(Uplink) ใช้ย่านความถี่ 6 GHz และสัญญาณขาลง (Downlink) ใช้ย่านความถี่ 4 GHz จึงนิยมเรียกว่า 6/4 GHz ความถี่ C-band นี้ อาจรบกวนกับการสื่อสารผ่านคลื่นไมโครเวฟบนภาคพื้นดินได้ง่าย อีกความถี่ที่ใช้งานมากคือ KU-bandใช้ความถี่ขาขึ้น12- 14 GHz และความถี่ขาลง 11 – 18 GHz โดยประมาณ ซึ่งนิยมใช้ในกิจการส่งสัญญาณโทรทัศน์โดยตรง (Direct Broadcast System: DBS) แต่มีข้อเสียหลัก คือสัญญาณจะถูกลดทอนกำลังจากเม็ดฝนค่อนข้างมาก ความถี่ย่าน X –band (8/7 GHz)ใช้ในกิจการทหาร ส่วนความถี่ย่าน KA-band (40/20 GHz) มีแนวโน้มจะนำมาใช้กันมากในอนาคต เพื่อแก้ปัญหาความแออัดของความถี่ใช้งาน
สำหรับความกว้างของแถบความถี่ (Bandwidth) การใช้งานปกติ C-band กว้าง 500MHz โดยทั่วไป แบ่งได้ 12 ช่องดาวเทียม (Transponder) กว้างช่องละ 40 MHz ซึ่งเพียงพอในการส่งสัญญาณโทรทัศน์ได้ 1 ช่อง หรือส่งสัญญาณเสียงอนาล็อกได้ 1500 ช่องการสื่อสาร หรือสัญญาณโทรทัศน์ ข้อมูลขนาด 50 – 10 เมกกะบิท (Megabits) ได้ความกว้างของแบนด์อาจกว้างขึ้นได้ถึง 1 GHz หรือ2 GHz เช่นในย่านความถี่ EHF (KA-band) ที่จะนำมาใช้ในอนาคต
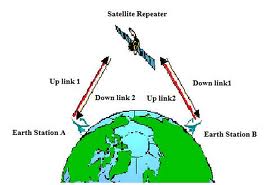
ภาพแสดง การรับ-ส่งสัญญาณดาวเทียม
และจากการรับ-ส่งสัญญาณของดาวเทียมข้างต้น จึงส่งผลให้เกิดการบันทึกข้อมูลของดาวเทียม โดยการบันทึกข้อมูลของดาวเทียม แบ่งออกเป็น2 ประเภท ได้แก่
(1) การบันทึกข้อมูลแบบพาสซีฟ (Passive) เป็นระบบที่บันทึกข้อมูลจากการสะท้อนคลื่นแสงใน เวลากลางวัน และคลื่นความร้อนจากดวงอาทิตย์ในเวลากลางคืน การบันทึกข้อมูลดาวเทียมแบบนี้ส่วนใหญ่จะอาศัยช่วงคลื่นแสงสายตา คลื่นแสงอินฟราเรด หรือคลื่นแสงที่ยาวกว่าเล็กน้อย ซึ่งไม่สามารถทะเลเมฆได้ จึงบันทึกข้อมูลพื้นที่ในช่วงที่มีเมฆปกคลุมไม่ได้
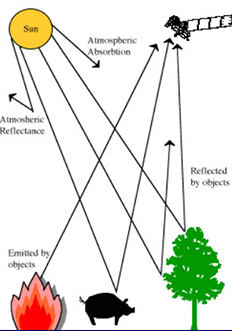
(2) การบันทึกข้อมูลแบบแอกทีฟ (Active) เป็นระบบที่ดาวเทียมผลิตพลังงานเองและส่งสัญญาณไปยังพื้นโลกแล้วรับสัญญาณที่สะท้อนกลับมายังเครื่องรับ การบันทึกข้อมูลของดาวเทียมแบบนี้ไม่ต้องอาศัยพลังงานจากดวงอาทิตย์เนื่องจากใช้พลังงานที่เกิดขึ้นจากตัวดาวเทียมที่เป็นช่วงคลื่นยาว เช่น ช่วงคลื่นไมโครเวฟ ซึ่งทะลุเมฆได้ จึงสามารถส่งสัญญาณคลื่นไปยังพื้นผิวโลกได้ตลอดเวลาข้อมูลที่ได้จากดาวเทียมจะมีคุณลักษณะแตกต่างกัน เช่น ข้อมูลเป็นตัวเลข (ส่วนมากมีค่า 0 – 255) ต้องใช้คอมพิวเตอร์ในการแปลความหมาย ข้อมูลเป็นภาพพิมพ์จะใช้วิธีแปลความหมายแบบเดียวกับรูปถ่ายทางอากาศ นอกจากนี้การวิเคราะห์ข้อมูลจากดาวเทียมมีองค์ประกอบหลักในการวิเคราะห์ 8 ประการ ได้แก่ ความเข้มของสี สี ขนาด รูปร่าง เนื้อภาพ รูปแบบ ความสูง และเงา ที่ตั้งและความเกี่ยวพัน
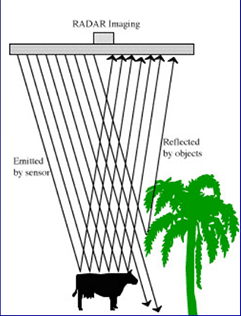
ภาพแสดงการบันทึกข้อมูลแบบแอกทีฟ (Active)
กลับไปที่เนื้อหา
ดาวเทียม THEOS เป็นดาวเทียมที่มีความสามารถในการถ่ายภาพรายละเอียดสูงได้ เนื่องจากดาวเทียม THEOS ติดตั้งอุปกรณ์ตรวจวัดด้านรีโมทเซนซิ่ง 2 ชนิด คือ กล้องถ่ายภาพขาว - ดำ (PAN camera) รายละเอียดภาพ 2 เมตร ความกว้างแนวถ่ายภาพ 22 กิโลเมตร และกล้องถ่ายภาพสีหลายช่วงคลื่น (Multispectral camera) รายละเอียดภาพ 15 เมตร ความกว้างของแนวถ่ายภาพ 90 กิโลเมตร
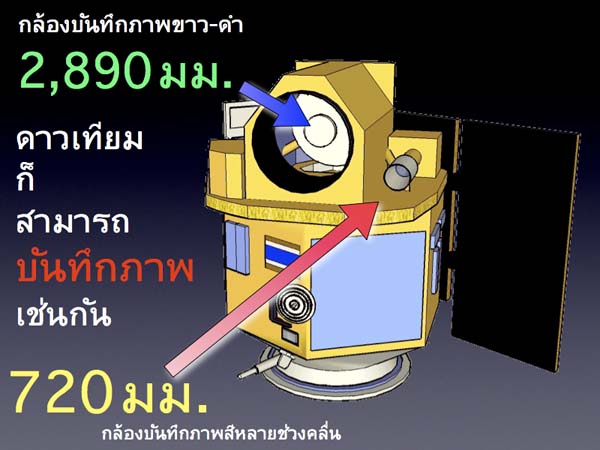
ภาพแสดงกล้องบันทึกภาพของดาวเทียม THEOS
ที่มา : สำนักงานพัฒนาเทคโนโลยีอวกาศและภูมิสารสนเทศ (องค์การมหาชน)
ทั้งนี้เพื่อให้สามารถบันทึกภาพซ้ำในตำแหน่งเดิมได้ในเวลาทุกๆ 2-5 วัน และเพื่อผลิตภาพข้อมูลดาวเทียมที่สามารถตอบสนองความต้องการใช้งานที่หลากหลายได้
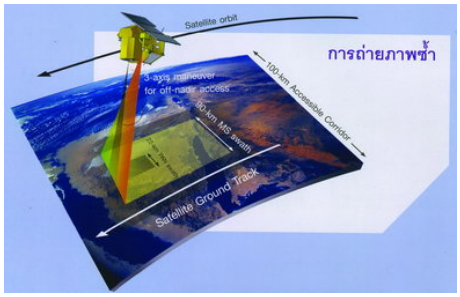
ภาพแสดงการถ่ายภาพซ้ำบริเวณเดิมของดาวเทียม THEOS
ที่มา : วารสารพระจอมเกล้าลาดกระบัง: ปีที่ 15 ฉบับที่ 3 เดือนธันวาคม 2550
นอกจากนี้ระบบการถ่ายภาพสีของดาวเทียม THEOS ยังมีจุดเด่น ที่สามารถถ่ายภาพในช่วงคลื่นแสงที่มองเห็น 3 ช่วงคลื่น คือ ช่วงคลื่นแสงสีแดง สีเขียว และสีน้ำเงิน และช่วงคลื่นแสงที่ตามองไม่เห็น คือ คลื่นอินฟาเรดใกล้ อีก 1 ช่วงคลื่น
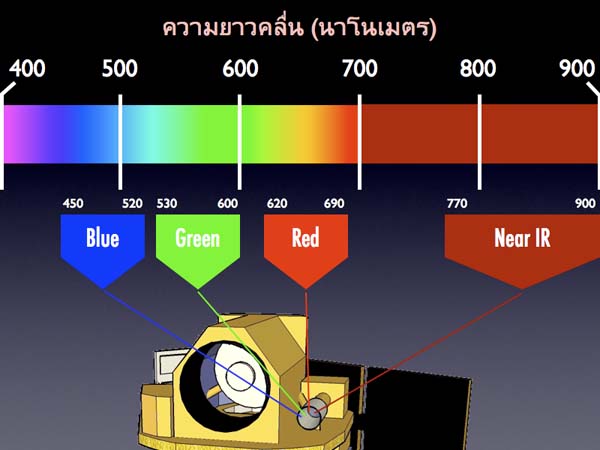
ภาพแสดงช่วงคลื่นที่กล้องบันทึกภาพของดาวเทียม THEOS จะสามารถถ่ายภาพได้
ที่มา : สำนักงานพัฒนาเทคโนโลยีอวกาศและภูมิสารสนเทศ (องค์การมหาชน)
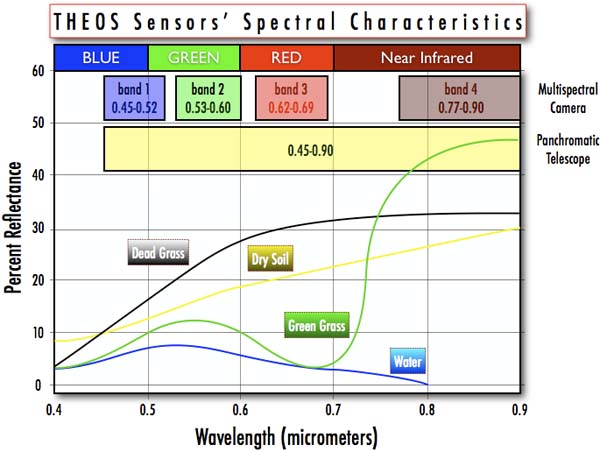
ภาพแสดง Spectral Reflectance และช่วงคลื่นต่างๆ ที่ดาวเทียม THEOS บันทึกภาพ
ที่มา : สำนักงานพัฒนาเทคโนโลยีอวกาศและภูมิสารสนเทศ (องค์การมหาชน)
การถ่ายภาพจากดาวเทียม THEOS มีสิ่งที่น่าสนใจ ดังนี้
คุณสมบัติของกล้องถ่ายภาพสีหลายช่วงคลื่น (MS camera)
กล้องถ่ายภาพสีหลายช่วงคลื่น MS เป็นอุปกรณ์ตรวจวัดที่ใช้แถว CCD เช่นเดียวกับกล้องถ่ายภาพระบบ PAN มีความสามารถในการแยกการบันทึกภาพในช่วงคลื่นแสงที่ตามองเห็น เป็น 3 ช่วง (Blue, Green, Red) และช่วงคลื่นในย่านอินฟราเรดใกล้ อีก 1 ช่วงคลื่น ซึ่งจะสามารถใช้ประโยชน์ในการจำแนกวัตถุบนพื้นผิว ที่มีความแตกต่างกันของคุณสมบัติการสะท้อนคลื่นแสงได้เป็นอย่างดี
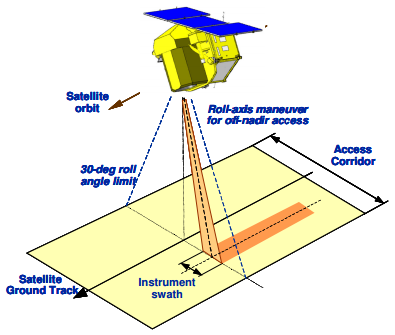
นอกจากนี้ดาวเทียม THEOS สามารถบันทึกภาพต่อเนื่อง มีความยาวแนวบันทึกภาพสูงสุดถึง 4,000 กม. เมื่อบันทึกภาพในแนวดิ่ง ดาวเทียม THEOS จะเอียงตัวบันทึกภาพได้ในแนวซ้าย-ขวา และ ก้ม-เงย โดยมีมุมเอียงปกติที่ 30° และมุมเอียงสูงสุด 50° ความสามารถในการเอียงตัวบันทึกภาพ ทำให้เราสามารถสร้างภาพ 3 มิติได้ โดยการบันทึกภาพพื้นที่เดียวกัน 2 ภาพ จากแนวการโคจรเดียวกัน หรือจากแนวการโคจรต่างกัน
ภาพแสดงการเอียงกล้องเพื่อถ่ายภาพของดาวเทียม THEOS
ที่มา : วารสารพระจอมเกล้าลาดกระบัง: ปีที่15 ฉบับที่3 เดือนธันวาคม2555
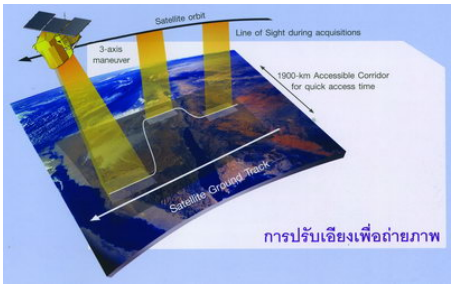
จากลักษณะการโคจรและการปรับเอียงของดาวเทียมดังกล่าวข้างต้น จึงส่งผลให้ศักยภาพในการเข้าถึงทุกพื้นที่ถ่ายภาพทั่งทั้งโลกจากกล้องถ่ายภาพขาว-ดำและกล้องถ่ายภาพสีนั้นใช้เวลาทั้งสิ้น 130 วัน และ 35 วัน
ภาพแสดงการเข้าถึงพื้นที่ถ่ายภาพภายใต้กรอบการเอียงตัวสูงที่สุด 30 องศา
ที่มา : สำนักงานพัฒนาเทคโนโลยีอวกาศและภูมิสารสนเทศ (องค์การมหาชน)
คุณสมบัติทางด้านการถ่ายภาพของดาวเทียม THEOS
ดาวเทียม THEOS นั้นจะสามารถผลิตข้อมูลได้ทั้งภาพ ขาว-ดำ และภาพสี ซึ่งภาพขาว-ดำอาจเติมสีได้ โดยใช้วิธีปรับความคมชัด(Pan Sharpening Method) และดาวเทียมสามารถประมวลผลได้หลายระดับ ดังนี้
ระดับ1A เป็นระดับที่มีการแก้ไขความบิดเบือน คลื่นแม่เหล็กไฟฟ้า เนื่องจากความไม่สม่ำเสมอของอุปกรณ์บันทึกภาพ เหมาะกับผู้ใช้ที่ต้องการแก้ไขเรขาคณิตเอง
ระดับ2A มีการแก้ไขทางเรขาคณิตเนื่องจากตัวระบบ เช่น ผลจากการถ่ายภาพแนวกว้าง ความโค้งและการหมุนของโลก ฯลฯ สามารถแก้ไขความบิดเบือนภายในของข้อมูลภาพ โดยใช้ข้อมูลระยะ มุม พื้นผิว ของบริเวณการฉาย (Projection) ของภาพ ในระบบUTM หรือWGS 84 โดยไม่ใช้หมุดควบคุม(Ground Control Point) และใช้แบบจำลองภูมิประเทศเพื่อแสดงความสูงเหนือรูปทรงรี (Ellipsoid) ที่อ้างอิง ทั้งนี้ดาวเทียม THEOS สามารถประมวลผลภาพถ่ายได้เป็นดังนี้
ระดับ 2A ได้กว่า 30 ภาพ/วัน และใช้เวลาในการประมวลผล น้อยกว่า30 นาทีต่อหนึ่งซีน(Scene)
ระดับ2B เป็นแผนที่ซึ่งมีการฉายและหมุนควบคุมจากแผนที่อื่นหรือวัดค่าพิกัดจากดาวเทียม GP(Global Positioning System) เป็นการแก้ไขระดับความสูงเฉลี่ย โดยใช้การฉายและแผนที่มาตรฐานข้อมูลระดับนี้ เหมาะกับการใช้งานที่พื้นที่ผิวบริเวณนั้นมีการเปลี่ยนแต่ไม่มากนัก
ภาพแสดงการสั่งบันทึกภาพและการส่งข้อมูลภาพถ่ายมายังสถานีภาคพื้น
ที่มา : สำนักงานพัฒนาเทคโนโลยีอวกาศและภูมิสารสนเทศ (องค์การมหาชน)
นอกจากนี้คุณลักษณะของภาพถ่ายที่ได้จากดาวเทียม THEOS ยังแบ่งได้เป็น
- คุณสมบัติทางด้านสเปกตรัม (Spectral Performance) ที่จะได้จากข้อมูลภาพถ่ายดาวเทียมTHEOS ทั้งจากกล้องภาพถ่ายขาวดำ และกล้องภาพถ่ายสีนั้น ช่วงคลื่นสีที่ได้จากกล้องถ่ายภาพสีจะสามารถรองรับและเพียงพอต่อการแยกแยะรายละเอียดของสิ่งที่ต้องการวิเคราะห์บนผิวโลกได้อย่างดี ในขณะเดียวกันข้อมูลที่ได้จากกล้องขาวดำซึ่งเป็นข้อมูลที่ให้ความละเอียดของจุดภาพสูงอยู่แล้ว ประกอบทั้งมีช่วงสเปกตรัมที่กว้างครอบคุลมช่วงสเปกตรัมทั้งหมดของกล้องถ่ายภาพสี จึงทำให้ได้ข้อมูลจากสิ่งที่ต้องการวิเคราะห์ทั้งหมด
- คุณสมบัติทางด้านความละเอียดเชิงพื้นที่ (Spatial Performance) ที่ได้จากข้อมูลภาพถ่ายดาวเทียม THEOS นั้น ได้ถูกคัดเลือกภายใต้การพิจาณาถึงขนาดของจุดภาพและความกว้างของภาพถ่ายดาวเทียม ซึ่งสามารถรองรับถึงความต้องการของผู้ใช้ได้ทั้งหมด
- คุณสมบัติทางด้านความชัดเจนของจุดภาพ (Radiometric Performance) ที่ได้จากข้อมูลภาพถ่ายระหว่างระดับความเข้มแสงต่อสัญญาณรบกวน โดยมีค่ามากกว่า 90 สำหรับภาพขาวดำ และ 100 สำหรับภาพสี
จากคุณสมบัติของของกล้องถ่ายภาพสีหลายช่วงคลื่น (MS camera) และด้านการถ่ายภาพของดาวเทียม THEOS แล้ว ดาวเทียม THEOS ได้รับการออกแบบให้มีความสามารถในการบันทึกข้อมูลแบบภาพคู่(StereoImage) ทั้งจากการบันทึกภาพในลักษณะแนวขวางโคจร (Across Track) และในแนวโคจร (Along Track) ดังนั้นข้อมูลดังกล่าวจึงสามารถนำมาจัดทำข้อมูลแบบจำลองความสูงเชิงตัวเลข (Digital Elevation Model; DEM) ได้ซึ่งจะเป็นประโยชน์ในการนำข้อมูล DEM ไปใช้ในการปรับแก้ข้อมูลภาพแบบออร์โท หรือนำไปใช้ในการสร้างแบจำลองสามมิติ เป็นต้น
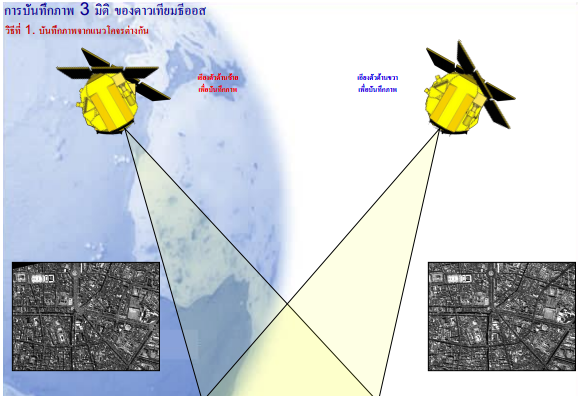
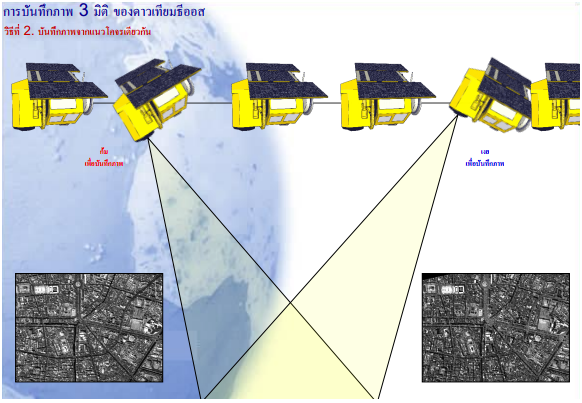
ภาพแสดงวิธีการบันทึกภาพ 3 มิติ ของดาวเทียม THEOS
ที่มา : สำนักงานพัฒนาเทคโนโลยีอวกาศและภูมิสารสนเทศ (องค์การมหาชน)
ดังนั้น ภาพถ่ายที่ได้จากดาวเทียม THEOS จนได้เป็นการแสดงข้อมูลจากดาวเทียมออกมาเป็นภาพสีนั้นเป็นสิ่งที่สำคัญ เพราะการแสดงภาพจากดาวเทียมที่อยู่ในรูปของช่วงความแตกต่างของสี (Range of different colors) จะช่วยในการแปลตีความด้วยสายตาได้ดีกว่าภาพ ระดับสีเทา (Tone of gray) เนื่องจากตามปกติสายตาของมนุษย์สามารถที่จะแยกแยะลำดับชั้นของสี (Shade of color) ได้ดีกว่าการแยกระดับความเข้มของสีเทา โดยเฉพาะข้อมูลภาพจากดาวเทียมสีขาวดำ (tone of gray) ในแต่ละช่วงคลื่น (Band) สามารถนำมาซ้อนทับกันได้ครั้งละ 3 Band โดยทำให้แต่ละ Band ที่เป็นสีขาวดำแทนด้วยแม่สีบวก (Additive Primary Color) 3 สีหลัก คือ สี แดง เขียว และน้ำเงิน เมื่อนำมาซ้อนทับกันจะได้ภาพที่เป็นภาพสีผสม (Color Composite) ปรากฏเป็นสีต่างๆ ซึ่งเป็นไปตามทฤษฎีสี คือ การซ้อนทับของแม่สีบวกแต่ละคู่จะให้แม่สีลบ(Subtractive Primary Color) คือ สีเหลือง (Yellow) บานเย็น (Magenta) และฟ้า (Cyan) การผสมข้อมูลภาพจากดาวเทียม 3 Band ให้เป็นภาพสีผสมนั้นขึ้นอยู่กับวัตถุประสงค์ที่ต้องการขยายรายละเอียดเฉพาะเรื่องให้ชัดเจน สามารถจำแนกหรือมีสีแตกต่างจากสิ่งแวดล้อม โดยทั่วไปแล้วภาพดาวเทียมสีผสมเท็จมาตรฐาน (Standard False Color Composite) ที่รู้จักกันทั่วไปคือ การผสมสีให้พืชพรรณปรากฏเป็นสีแดง โดยมีหลักการดังนี้คือ แทนข้อมูลดาวเทียมที่บันทึกในช่วงคลื่นสีเขียว (green) ด้วยสีน้ำเงิน(blue), ข้อมูลดาวเทียมที่บันทึกในช่วงคลื่นสีแดง (red) แทนด้วยสีเขียว (green) และข้อมูลดาวเทียมที่บันทึกในช่วงคลื่นอินฟราเรดใกล้ (near infrared) แทนด้วยสีแดง (red) ตัวอย่างของการผสม ข้อมูลภาพจากดาวเทียม 3 Band ให้เป็นภาพดาวเทียมสีผสมเท็จมาตรฐาน ซึ่งคุณสมบัติที่สำคัญเหล่านี้ทำให้ภาพสีเป็นที่ใช้กันอย่างแพร่หลายในด้านการแสดงภาพหรือการผลิตข้อมูลภาพจากดาวเทียม
จากระบบการถ่ายภาพของดาวเทียม THEOS ที่กล่าวมาทั้งข้างต้น ข้อมูลภาพที่ถ่ายจากดาวเทียมจะถูกจัดส่งมายังสถานีภาคพื้นในทันที หรือในกรณีที่ดาวเทียมโคจร ไปในจุดที่ไม่มีสถานีรับสัญญาณก็สามารถที่จะเก็บภาพไว้บนตัวดาวเทียม ซึ่งสามารถเก็บได้ถึง 100 ภาพ ซึ่งความสามารถเหล่านี้จะส่งผลให้เกิดการนำข้อมูลภาพที่ได้จากดาวเทียมไปใช้แปลความหมายแล้วนำไปใช้ในด้านต่างๆ ต่อไป
วีดิทัศน์ เรื่องการถ่ายภาพจากดาวเทียมไทยโชต
กลับไปที่เนื้อหา
ภายหลังจากที่เราดาวเทียมเริ่มทำการถ่ายภาพนั้น ภาพถ่ายจากดาวเทียมที่ได้จะประกอบด้วยจุดภาพเล็กๆ(Pixel) ต่อเรียงกันเป็นเส้น (Line) หรือบรรทัด บรรทัดหนึ่งๆ จะมีจำนวนจุดภาพเท่าใดนั้น ก็ขึ้นอยู่ว่าข้อมูลได้มาจากดาวเทียมและระบบการบันทึกภาพอย่างไร โดยทั่วไปแล้วการแปลตีความภาพถ่ายดาวเทียมจะมุ่งเน้น ที่การตีความหมายของกลุ่มจุดภาพ (Group of pixel) ที่รวมกันอยู่ ซึ่งอาจแสดงรูปร่างที่มีขนาด (Size and Shape) แตกต่างกัน ตลอดจนความแตกต่างกันในเรื่องของระดับสีหรือสี (Tone or Color) ลักษณะเนื้อภาพ (Texture) รูปแบบการจัดเรียงตัวของวัตถุ (Pattern or Structure) และความแน่นทึบที่ต่างกัน ดังนั้นการแปลภาพด้วยสายตาจึงมีความจำเป็นที่จะต้องพิจารณาถึงองค์ประกอบที่กล่าวมา เพื่อให้การแปลตีความภาพถ่ายดาวเทียมด้วยสายตา มีความถูกต้องแม่นยำมากที่สุด


การแปลความหมายจากดาวเทียม เป็นการวิเคราะห์และแปลความหมายภาพจากดาวเทียมสำรวจทรัพยากรแบ่งได้เป็น 2 วิธีการ คือ การแปลตีความภาพด้วยสายตาและการวิเคราะห์ข้อมูลภาพด้วยคอมพิวเตอร์ ซึ่งในที่นี้จะขอกล่าวแต่เฉพาะการแปลข้อมูลจาดาวเทียมด้วยสายตา ซึ่งการแปลความหมายจากข้อมูลภาพดาวเทียมด้วยสายตาเป็นวิธีการแปลความหมายจากข้อมูลภาพโดยไม่ใช้คอมพิวเตอร์เพื่อให้ได้ข้อมูลตามวัตถุประสงค์ การจำแนกข้อมูลวิธีนี้ มักจะประมวลและตีความข้อมูลที่ ได้จากภาพถ่ายทางอากาศหรือภาพดาวเทียมเข้ากับข้อมูลอื่นๆ เช่น ข้อมูลที่ ได้จากการสำรวจภาคสนาม หรือแผนที่ การใช้ประโยชน์ที่ดิน เป็นต้น ผู้ที่สามารถแปลตีความภาพได้ดีนั้นจะต้องอาศัยความรู้หลายสาขาวิชาเข้ามาเกี่ยวข้อง เพื่อช่วยในการวิเคราะห์ตีความและวินิจฉัย อาทิเช่น ภูมิศาสตร์ เกษตร ธรณีวิทยา เป็นต้น ซึ่งผู้แปลตีความที่ดีควรมีคุณสมบัติดังนี้
1. ความรู้ภูมิหลัง (Background) ถ้าผู้แปลตีความมีความรู้และประสบการณ์ในด้านนั้นอยู่ แล้วย่อมจะได้เปรียบผู้อื่นที่มาจากสาขาอื่น
2. ความสามารถทางสายตา (Visual Acuity) เป็นคุณสมบัติที่สำคัญอย่างหนึ่งของผู้แปล ไม่เป็นผู้พิการทางสายตา เช่น ตาบอด ตาบอดสี เนื่องจากการแปลตีความจำเป็นต้องอาศัยความสามารถทางด้านสายตาเป็นองค์ประกอบ เพราะต้องพิจารณารายละเอียดที่ ปรากฏในภาพ ลักษณะของเนื้อภาพ (Texture) ความเข้ม/สี (Tone/Color) ผู้ที่มีสายตาดีย่อมสามารถจำแนกพื้นที่ได้ดีกว่า
3. ความสามารถของจิตใจ (Mental Acuity) มีความสัมพันธ์กับภูมิหลังและประสบการณ์ การเป็นคนใจเย็น รอบคอบ ชอบสังเกต จะทำให้สามารถแปลตีความได้ดี
4. ประสบการณ์ (Experience) ผู้แปลตีความที่มีประสบการณ์เกี่ยวกับลักษณะสภาพแวดล้อมหรือลักษณะภูมิประเทศ ในพื้นที่หรือบริเวณที่ทำการแปลตีความจะช่วยให้สามารถแปลตีความและวินิจฉัยสิ่งที่ปรากฏในภาพได้ดีกว่าผู้ที่ไม่มีประสบการณ์
ดังนั้นหลักในการแปลตีความข้อมูลภาพดาวเทียมเพื่อให้เกิดประสิทธิภาพในการดำเนินงานมากที่สุด ควรดำเนินงานตามขั้นตอน ดังนี้
1) แปลตีความจากสิ่งที่เห็นชัดเจน เข้าใจและวินิจฉัยง่ายที่สุดไปหายากที่สุด (Easy to difficulty) เพื่อ หลีกเลี่ยงความรู้สึกท้อใจเบื่อหน่ายในการแปลตีความ โดยสิ่งที่ยากและสงสัยควรแปลตีความในภายหลัง
2) แปลตีความจากสิ่งที่คุ้นเคยหรือพบเห็นในชีวิตประจำวันหรือสิ่งที่อยู่ใกล้ตัวก่อน แล้วลงมือแปลสิ่งที่คุ้นเคยน้อยภายหลัง (Around to far) ทั้งนี้ขึ้นอยู่กับประสบการณ์และความรู้พื้นฐานของผู้แปลตีความ
3) แปลตีความจากกลุ่มใหญ่ก่อน แล้วจึงพิจารณาแยกรายละเอียดในแต่ละประเภท ซึ่งเรียกว่าแปลตีความ จากหยาบไปหาละเอียด (Zone to Sub-Zone) ควรเริ่มจากประเภทการใช้ที่ดินระดับ I (level I) เช่น พื้นที่อยู่อาศัย, พื้นที่ทำการเกษตร, พื้นที่ป่าไม้และแหล่งน้ำ แล้วจึงจำแนกออกเป็นการใช้ที่ดินระดับII (level II) เช่น จำแนกพื้นที่ทำการเกษตรออกเป็นนาข้าว พืชไร่ และพืชสวน หลังจากนั้นจึงจำแนกออกเป็นระดับIII (level III) เช่น จำแนกพืชสวนออกเป็น เงาะ ทุเรียน มะม่วง ต่อไป
4) แปลตีความเรียงลำดับเป็นระบบให้ครบวงจร (Complete cycle) ในแต่ละประเภท ไม่ควรสลับไปมาปะปนกัน เพราะจะทำให้รายละเอียดของข้อมูลไม่ต่อเนื่องกัน หรืออาจจะขาดหายไปได้
5) แปลตีความโดยใช้ปัจจัยหรือข้อมูลที่มีความสัมพันธ์กันอันเป็นพื้นฐานที่จะวินิจฉัยข้อมูลได้อย่างถูกต้อง (Data association) เช่น การแปลตีความของแหล่งน้ำ ซึ่งมีวัตถุประสงค์สร้างไว้เพื่อการเพาะปลูกจะมีความสัมพันธ์กับพื้นที่ต้องการน้ำ เช่น หากเป็นที่เนินพื้นที่รับน้ำควรเป็นพืชสวน หากเป็นพื้นที่ราบพื้นที่รับน้ำ ควรจะเป็นนาข้าว หรือพืชผักสวนครัว เป็นต้น ซึ่งเป็นไปตามวัตถุประสงค์ของการสร้างอ่างเก็บน้ำ
ดังนั้นการแปลตีความภาพจากดาวเทียม หรือการใช้ภาพจากดาวเทียม เพื่อช่วยในการสำรวจด้านต่างๆ เช่น ด้านการใช้ที่ดิน การหาพื้นที่ป่าไม้ การหาพื้นที่ เกษตรกรรม และการสำรวจแหล่งแร่ เป็นต้น จะเอื้ออำนวยให้การสำรวจด้านนั้น ๆ สะดวกรวดเร็วขึ้น การแปลตีความที่มีคุณภาพดีจะทำให้การสำรวจนั้นถูกต้องแม่นยำขึ้นด้วย ข้อมูลที่ได้รับจากภาพดาวเทียม เมื่อทำการวิเคราะห์แปลตีความแบ่งเป็น 2 ประเภทใหญ่ๆ คือ
- ข้อมูลทางด้านปริมาณ (Quantitative Information) เป็นข้อมูลที่ผู้แปลสามารถนับจำนวน วัดหาระยะทาง หรือพื้นที่ออกมาเป็นตัวเลขได้จากการแปลตีความภาพถ่ายจากดาวเทียม
- ข้อมูลทางด้านคุณภาพ (Qualitative Information) การที่ภาพหนึ่งครอบคลุมพื้นที่เป็นบริเวณกว้าง และมองเห็นได้กว้างไกล (Synoptic view) ทำให้ได้ข้อมูลแบบกว้าง (Macro detail) ซึ่งข้อมูลในลักษณะนี้ จะเป็นที่ ต้องการและเหมาะสมในงานบางประเภท เช่น การวางแผนระดับภาค ซึ่งต้องการรายละเอียดแบบกว้างๆ และสามารถทำได้รวดเร็วโดยการใช้ข้อมูลจากดาวเทียม นอกจากนี้ลักษณะภูมิประเทศหลายประเภทที่ ไม่สามารถบ่งบอกได้ หากไม่พิจารณาดูแบบกว้าง ภาพจากดาวเทียม การแปลตีความเพื่อให้ได้มาซึ่งเป็นข้อมูลทางด้านคุณภาพ เช่น การศึกษาลักษณะภูมิประเทศ(Landscape) รูปแบบลำน้ำ (Drainage pattern) หรือ ธรณีสัณฐาน (Geomorphology) เป็นต้น การแปลตีความภาพถ่ายดาวเทียมเพื่อให้ได้ข้อมูลเชิงคุณภาพ เป็นหนึ่งในวิธีการเพื่อให้ได้แผนที่ เฉพาะเรื่อง(Thematic map) ด้วยเช่นกัน
จากที่กล่าวมาข้างต้นจะพบว่าการแปลข้อมูลจากดาวเทียมจะช่วยให้ผู้นำข้อมูลไปใช้ในแต่ละสถานการณ์เข้าใจในรายละเอียดที่ได้จากภาพถ่ายดาวเทียมมากขึ้น ดังเช่นตัวอย่างกรณี การใช้ข้อมูลจากดาวเทียมในการประเมินความเสียหายจากอุทกภัย ปี 2553 ซึ่งช่วยทำให้หน่วยงานที่เกี่ยวข้องนำข้อมูลดังกล่าวไปใช้ในการจัดเตรียมสิ่งของเพื่อนำไปช่วยเหลือผู้ประสบภัย เป็นต้น
วีดิทัศน์ เรื่องการแปลข้อมูลจากดาวเทียม
กลับไปที่เนื้อหา
อากาศยานไร้คนขับหรือ UAV (Unmanned Aerial Vehicle: UAV) เป็นอากาศยานที่ไม่มีนักบินประจำการอยู่บนเครื่อง เป็นอากาศยานที่ไร้คนขับหรือนักบินแต่สามารถควบคุมได้ อากาศยานไร้คนขับมีรูปร่าง ขนาด รูปแบบ และเอกลักษณ์ที่แตกต่างกันออกไป ตามหลักแล้วอากาศยานไร้คนขับ ก็คือ โดรน (Drone) นั่นเอง เป็นอากาศยานที่ควบคุมจากระยะไกล ใช้การควบคุมอัตโนมัติซึ่งมีอยู่ 2 ลักษณะ คือ การควบคุมอัตโนมัติจากระยะไกล และการควบคุมแบบอัตโนมัติโดยใช้ระบบการบินด้วยตนเองซึ่งต้องอาศัยโปรแกรมคอมพิวเตอร์ที่มีระบบที่ซับซ้อนแล้วมีการติดตั้งไว้ในอากาศยานและในส่วนของการตัดสินเส้นทางการบินนั้น แบ่งออกเป็น 3 รูปแบบ คือ 1) บังคับจากศูนย์ควบคุมระยะไกล 2) มีการโปรแกรมไว้ให้บินไปตามเส้นทางที่กำหนด 3) วินิจฉัยการเดินทางด้วยคอมพิวเตอร์บนอากาศยาน



การสร้างอากาศยานไร้คนขับหรือ UAV โดยทั่วไปจะคำนึงถึงหลัก 5 ประการ คือ ระยะเวลาบิน ความเร็ว รัศมีทำการ ความสูง และน้ำหนักรวม ดังนั้น ส่วนประกอบที่เมื่อพิจารณาโดยรวมทั้งระบบแล้วระบบอากาศยานไร้คนขับจะแยกได้ 10 ส่วน คือ
1. โครงเครื่องบิน (Airframe) โครงสร้างอาจมีรูปร่างต่างๆ กัน ส่วนวัสดุที่ใช้ก็มีหลายแบบ เช่น โลหะ พลาสติกผสมคาร์บอน ไฟเบอร์ผสม และวัสดุดูดกลืนคลื่นเรดาร์ เป็นต้น
2. ระบบขับเคลื่อนหรือเครื่องยนต์ (Propulsion System) ระบบขับเคลื่อนที่ใช้กับอากาศยานไร้ คนขับมีหลายแบบ เช่น เครื่องยนต์ 2 จังหวะ เครื่องยนต์ 4 จังหวะ เครื่องยนต์โรตารีมอเตอร์ไฟฟ้า เครื่องยนต์จรวด และเครื่องยนต์เทอร์โบเจ็ต เป็นต้น
3. ระบบควบคุม (Control System) การทำงานของอากาศยานไร้คนขับจะเป็นแบบการบังคับแบบใช้วิทยุจากพื้นดิน หรือการใช้โปรแกรมควบคุมการบินด้วยระบบคอมพิวเตอร์ ในปัจจุบันสามารถควบคุมได้โดยนักบินขณะบิน
4. ระบบการส่งและกลับคืน (Launch and Recovery System) การส่งอากาศยานไร้คนขับหรือยูเอวี ขึ้นไปทำได้หลายวิธี เช่น การยิงจากเครื่องส่ง (Launch) การวิ่งขึ้นจากทางวิ่ง หรือการปล่อยจากอากาศยานขนาดใหญ่ และการกลับคืนฐานที่ตั้งก็สามารถทำได้หลายวิธี เช่น การจับด้วยตาข่าย การใช้ร่มชูชีพ การใช้พาราฟอยล์ และการบังคับลงบนรันเวย์ด้วยวิทยุบังคับ
5. ระบบนำร่องและนำวิถี (Navigation and Guidance System) เป็นส่วนที่สำคัญของอากาศยานไร้ คนขับ ในปัจจุบันระบบนำร่องและนำวิถี ส่วนใหญ่จะใช้ จีพีเอส (GPS) เป็นตัวช่วย โดยปกติแล้วอากาศยานไร้คนขับหรือยูเอวีจะใช้เครื่องคอมพิวเตอร์ที่ทำงานที่มีด้านระบบนำร่องและนำวิถีโดยเฉพาะแยกออกมาจากระบบควบคุมอัตโนมัติ
6. ระบบควบคุมและสนับสนุนภาคพื้น (Ground Control Station) ระบบควบคุมและสนับสนุนภาคพื้นของอากาศยานไร้คนขับทำงานคล้ายๆ กับระบบควบคุมภาคพื้นของอากาศยานทั่วๆ ไป โดยมีหน้าที่ตรวจสอบ การทำงานและตรวจข้อมูลต่างๆ ที่ส่งมาจากอากาศยานไร้คนขับนอกจากนั้นยังสามารถสั่งตัวตรวจวัดต่างๆ ทำงานตามที่เราต้องการ โดยส่งข้อมูลผ่านข่ายรับ – ส่งข้อมูลไร้สาย
7. สัมภาระที่บรรทุกได้ (Payload) ปกติอากาศยานไร้คนขับที่ทำหน้าที่สำรวจหรือตรวจการณ์จะนำ อุปกรณ์ตรวจจับต่างๆ ขึ้นไป เช่น กล้องถ่ายภาพนิ่ง กล้องอินฟราเรด กล้องถ่ายภาพเคลื่อนไหว และเรดาร์ แต่ในปัจจุบันได้มีการพัฒนาอากาศยานไร้คนขับหรือยูเอวีที่ทำหน้าที่ในการสอดแนมและโจมตี ซึ่งอากาศยานไร้ คนขับหรือยูเอวีเหล่านี้จึงอาจมีการติดตั้งจรวดหรือระเบิดขนาดต่างๆ ตามภารกิจ
8. ระบบการเชื่อมต่อและเก็บข้อมูล (Data Link and Storage System) ระบบเชื่อมต่อระหว่างอากาศยานไร้คนขับกับระบบควบคุมและสนับสนุนภาคพื้นดิน ใช้หลายย่านความถี่ เช่น ย่านความถี่สูง (HF) ย่านความถี่สูงมาก (VHF) และย่านไมโครเวฟ หากระบบเหล่านี้ขัดข้องจะส่งต่อไปยังข่ายอื่นๆ เช่น ดาวเทียม แล้วกลับมายังสถานีภาคพื้น
9. ระบบป้องกันตนเอง (Self – Protection System) เช่น การใช้วัสดุที่สามารถดูดกลืนคลื่นเรดาร์แบบเครื่องบินขับไล่ที่มีคุณสมบัติตรวจจับได้ยาก
10. กำลังพล (Operating Personnel) ในปัจจุบันผู้ที่ทำงานในระบบอากาศยานไร้คนขับจะต้องเป็นผู้ที่มีประสบการณ์สูง และได้รับการฝึกมาเป็นอย่างดีเกี่ยวกับการบังคับอากาศยานไร้คนขับ
จึงอาจกล่าวได้ว่า อากาศยานไร้คนขับคือเครื่องบินที่สามารถบินได้ด้วยระบบอัตโนมัติ โดยไม่ต้องใช้นักบินประจำการอยู่บนอากาศยาน อาจมีการติดตั้งกล้องถ่ายภาพคุณภาพสูงทั้งกล้องถ่ายภาพในเวลากลางวัน (Electro Optical) และกล้องอิฟาเรด (Infrared Sensor) ที่สามารถบันทึกภาพระยะไกลได้แล้วแพร่ภาพสัญญาณมายังจอภาพ ที่สถานีภาคพื้นดิน ในเวลาที่ใกล้เวลาจริงมากที่สุด (Near Real Time: NRT) ทำให้ผู้บังคับบัญชาสามารถมองเห็นภาพสนามรบในเวลาที่ใกล้เวลาเป็นจริงมากที่สุด นอกจากนั้นอากาศยานไร้คนขับยังสามารถปฏิบัติภารกิจด้านข่าวกรอง การเฝ้าตรวจ การค้นหาเป้าหมาย และการลาดตระเวนหรือที่เราเรียกว่า ISTAR (Intelligence, Surveillance, Target Acquisition, Reconnaissance) ได้ เป็นต้น โดยภาพที่ได้จากการใช้ UAV จะถูกส่งเป็นสัญญาณภาพหรือสัญญาณ วีดิทัศน์ของเป้าหมายไปยังศูนย์ควบคุม เพื่อทางศูนย์ควบคุมจะทำการแปลความหมายจากภาพแล้วนำข้อมูลไปใช้งานในด้านต่างๆ ต่อไป
ดังนั้น UAV ถูกนำมาใช้ประโยชน์และมีรูปแบบการใช้งานได้หลากหลาย เช่น ตรวจจับองค์ประกอบในอากาศ ใช้ในการขนส่ง ใช้ในการโจมตีทางอากาศ ใช้ในการถ่ายภาพมุมสูง ดูสภาพจราจร ช่วยเหลือภัยพิบัติต่างๆ ซึ่งในประเทศไทยก็เริ่มมีการนำมาใช้งานกันอย่างแพร่หลาย ซึ่งการนำ UAV มาใช้เพื่อบันทึกภาพแต่ละครั้งอาจต้องคำนึงถึงสิ่งที่จะส่งผลต่อการปฏิบัติงาน ได้แก่ สภาพทางภูมิศาสตร์ เช่น พื้นที่ที่ต้องการบันทึกภาพ และสภาพภูมิอากาศ ได้แก่ สภาพอากาศในวันเวลาที่จะขึ้นบิน เป็นต้น
วีดิทัศน์ เรื่อง UAV
กลับไปที่เนื้อหา
การเดินทางขึ้นสู่อวกาศนั้นเป็นสิ่งที่หลายๆ คนใฝ่ฝัน เช่นเดียวกันกับนักบินอวกาศหญิงของไทยคนแรก ซึ่งบุคคลท่านนี้ก็ใฝ่ฝันเช่นกัน จนกระทั่งบุคคลท่านได้มีโอกาสที่จะได้ขึ้นไปในอวกาศในโครงการ AXE Apollo Space Academy บุคคลท่านนี้ก็คือ คุณพิรดา เตชะวิจิตร์ ซึ่งเป็นตัวแทนคนไทยที่ได้ไปท่องอวกาศ โดยคุณพิรดาสำเร็จการศึกษาด้านวิศวกรรมคอมพิวเตอร์ จากสถาบันเทคโนโลยีพระจอมเกล้าเจ้าคุณทหารลาดกระบัง จากนั้นได้รับทุนการศึกษาภายใต้ THEOS Operation Training Program (TOTP) ของโครงการพัฒนาดาวเทียมสำรวจทรัพยากรดวงแรกของไทย หรือดาวเทียมไทยโชต เพื่อศึกษาต่อระดับปริญญาโท ด้านดาวเทียมที่สถาบัน ISAE ประเทศฝรั่งเศส ปัจจุบันปฏิบัติงานในตำแหน่ง นักพัฒนานวัตกรรม สำนักพัฒนาอุทยานรังสรรค์นวัตกรรมอวกาศ สำนักงานพัฒนาเทคโนโลยีอวกาศและภูมิสารสนเทศ (องค์การมหาชน) (GISTDA) คุณพิรดามีความสนใจในทางด้านอวกาศและอยากเป็นนักบินอวกาศมาโดยตลอด รวมทั้งมีคนที่เป็นแรงบันดาลใจให้คุณพิรดาเดินตามความฝัน ก็คือ นักบินอวกาศหญิงคนแรกของเกาหลีใต้ “คุณ ยี โซฮยอน”
จากที่กล่าวมาข้างต้นว่าคุณพิรดาได้รับคัดเลือกเป็นตัวแทนคนไทยในโครงการ AXE Apollo Space Academy นั้น โครงการนี้เป็นการคัดเลือกผู้เหมาะสมที่จะเดินทางไปอวกาศด้วยยาน LYNX MARK II (ลิงซ์ มาร์ค ทู) ซึ่งภายหลังจากที่ได้รับการคัดเลือกคุณพิรดาและทีม จะต้องฝึกภารกิจหลัก 3 ภารกิจ คือ
- Air combat หรือ ภารกิจ “G Centrifuge” เป็นการฝึกนั่งเครื่องบินในห้องนักบินในสภาวะการขับขี่ยานขึ้นสู่อวกาศจริงแบบซิมูเลเตอร์ เพื่อทดสอบสภาวะร่างกายและลองเปิดรับประสบการณ์จริงภายใต้แรงดันสูงสุดถึง 4.5 จี ทดสอบบินจริงบนเครื่องบินความเร็วมากกว่าความเร็วเสียง พร้อมกลับหัวกลางอากาศ ซึ่งระหว่างฝึกปฏิบัติภารกิจนี้ จะรู้สึกว่าเลือดมันไหลเวียนลงไปที่เท้า เหมือนโดนฉุดกระชากลงไป ซึ่งจะส่งผลให้หน้ามืด เพราะฉะนั้นผู้ฝึกต้องพยายามเกร็งไม่ให้เลือดลงไปเยอะ ต้องใช้พลังงานสูงและร่างกายต้องฟิตและแข็งแรงมากๆ
- ภารกิจสภาวะไร้น้ำหนัก หรือ Zero G Flight ไฟลต์บินเป็นโค้งพาราโบลา ซึ่งเป็นสภาวะที่ไม่สามารถทำได้บนพื้นโลกปกติ เป็นหนึ่งในบททดสอบของผู้ชนะการแข่งขัน EXE Apollo เพื่อฝึกซ้อมร่างกายและจิตใจให้พร้อมก่อนจะเดินทางไปสัมผัสสภาวะไร้น้ำหนักในห้วงอวกาศ โดยภารกิจนี้ถือเป็นภารกิจหนึ่งที่เข้มข้นและยากอีกทั้งเป็นประสบการณ์ที่หาบนโลกไม่ได้
- ภารกิจฝึกในเครื่อง G Force คือฝึกให้อยู่ในเครื่องให้เราลองอยู่ในแรงเหวี่ยง นอกจากผ่านการฝึกภารกิจทั้ง 3 ภารกิจแล้ว อีกหัวใจหลักของการฝึกนี้ก็คือ การทำงานเป็นทีมเวิร์ก รวมถึงสภาวะการเป็นผู้นำที่ทุกคนต้องมี นอกจากนี้ยังต้องมีการฝึก Astronaut Assault Course คือการฝึกความแข็งแกร่งของร่างกาย ในเรื่องของความกล้าหาญ เสมือนการฝีกในค่ายทหาร เช่น ปีนผาจำลอง วิดพื้น 50 ครั้ง ซิตอัพ 50 ครั้ง กระโดดข้ามรั้ว กระโดเชือก ซึ่งเป็นภารกิจที่ถือว่าหนักมาก
ดังนั้น การเรียนรู้ทางด้านอวกาศนี้จึงเป็นสิ่งที่น่าสนใจเป็นอย่างมาก หากบุคคลท่านใดสนใจที่จะเรียนรู้ในศาสตร์ทางด้านในปัจจุบันประเทศไทยและต่างประเทศต่างก็มีสถาบันการศึกษาและหน่วยงานที่ให้ความรู้เกี่ยวกับศาสตร์ทางด้านนี้ ซึ่งการพัฒนากำลังคนและความรู้ทางด้านเทคโนโลยีอวกาศและภูมิสารสนเทศ จะช่วยให้ประเทศมีการพัฒนาด้านเทคโนโลยีอวกาศและภูมิสารสนเทศให้มีความพร้อมมากยิ่งขึ้นอีกด้วย
วีดิทัศน์ เรื่องนักบินอวกาศหญิงคนแรกของไทย
กลับไปที่เนื้อหา
ฐิตาภรณ์ สาดแสงจันทร์. การจำแนกเชิงวัตถุจากข้อมูลภาพถ่ายดาวเทียม THEOS : กรณีศึกษาในบริเวณจังหวัด นนทบุรี. โครงงานทางภูมิศาสตร์ , ภาควิชาภูมิศาสตร์ คณะอักษรศาสตร์ จุฬาลงกรณ์ มหาวิทยาลัย, 2556.
ทวีวุฒิ พงศ์พิพัฒน์. มนุษยชาติกับเทคโนโลยี ตอนที่ ๓ อากาศยานไร้คนขับ. วารสารนาวิกศาสตร์ ปีที่ 94 ฉบับที่ 11(พฤศจิกายน 2554): 5-16.
ธีระ ลาภิศชยางกูล. ธีออสดาวเทียมสํารวจทรัพยากรธรรมชาติของไทย. วารสารพระจอมเกล้าลาดกระบัง ปีที่15 ฉบับที่3 (ธันวาคม2550) : 11-16.
บุญชัย มิ่งมงคลมิตร. ดาวเทียมธีออส:ดาวเทียมสำรวจทรัพยากรดวงแรกของประเทศ. [ออนไลน์],2557. แหล่งที่มา:http://negistda.kku.ac.th/activity/2010/se100907/12_pp149-156.pdf [5 กันยายน 2557].
ฝ่ายวิเคราะห์เทคโนโลยีป้องกันประเทศ. รู้จักกับอากาศยานไร้คนขับหรือยูเอวี (Unmanned Aerial Vehicle:UAV). [ออนไลน์] ,2557. แหล่งที่มา: http://dtad.dti.or.th/index.php?option=com_content&view=article&id=129:nmanned-aerial-vehicle- intro&catid=8:special-article&Itemid=10 [5 กันยายน 2557].
พิรดา เตชะวิจิตร์ . นักพัฒนานวัตกรรม สำนักพัฒนาอุทยานรังสรรค์นวัตกรรมอวกาศ. สัมภาษณ์, 27 สิงหาคม2557.
ศูนย์การเรียนรู้วิทยาศาสตร์โลกและดาราศาสตร์. ประเภทของดาวเทียม. [ออนไลน์], 2557.แหล่งที่มา:http://www.lesa.biz/space-technology/satellite/types-of-satellites [5 กันยายน 2557].
สารานุกรมไทยสำหรับเยาวชน. ดาวเทียมเพื่อการเกษตร.[ออนไลน์], 2557. แหล่งที่มา :http://saranukromthai.or.th/sub/book/book.phpbook=16&chap=9&page=chap9.htm [5 กันยายน 2557].
สำนักงานพัฒนาเทคโนโลยีอวกาศและภูมิสารสนเทศ.การใช้ข้อมูลดาวเทียมกับสถานการณ์ต่างๆ. [ออนไลน์] ,2557.แหล่งที่มา: http://www.gistda.or.th/old-web/index.php/gallery-events [5 กันยายน 2557].
สำนักงานพัฒนาเทคโนโลยีอวกาศและภูมิสารสนเทศ.ข้อมูลขององค์กร. [ออนไลน์] ,2557. แหล่ง ที่มา:http://www.gistda.or.th/main/th/node/66[5 กันยายน 2557].
สำนักงานพัฒนาเทคโนโลยีอวกาศและภูมิสารสนเทศ.ความรู้เกี่ยวกับดาวเทียม. [ออนไลน์] ,2557. แหล่งที่มา:http://www.rmutphysics.com/charud/oldnews/201/sattlelite/Thindex.htm [5 กันยายน 2557].
สำนักงานพัฒนาเทคโนโลยีอวกาศและภูมิสารสนเทศ.ความรู้พื้นฐานเกี่ยวกับเทคโนโลยีอวกาศและภูมิสารสนเทศ.กรุงเทพมหานคร:สำนักงานพัฒนาเทคโนโลยีอวกาศและภูมิสารสนเทศ, 2547.(อัดสำเนา)
สำนักงานพัฒนาเทคโนโลยีอวกาศและภูมิสารสนเทศ. คู่มือผู้ใช้ข้อมูลดาวเทียมธีออส (THEOS). กรุงเทพมหานคร:สำนักงานพัฒนาเทคโนโลยีอวกาศและภูมิสารสนเทศ, 2552. (อัดสำเนา)
สำนักงานพัฒนาเทคโนโลยีอวกาศและภูมิสารสนเทศ.รายงานประจำปี 2552. กรุงเทพมหานคร: สำนักงาน พัฒนาเทคโนโลยีอวกาศและภูมิสารสนเทศ, 2552. (อัดสำเนา)
สำนักงานพัฒนาเทคโนโลยีอวกาศและภูมิสารสนเทศ.หนึ่งเดียวของไทย พิรดา เตชะวิจิตร์ ฝันให้ไกล ไปให้ ถึงอวกาศ.[ออนไลน์], 2557. แหล่งที่มา: http://www.gistda.or.th/old-web/index.php/ [12 กันยายน 2557].
กลับไปที่เนื้อหา
-
คลังรูปภาพ
ชื่อ GalleryUAVGalleryชื่อ Galleryบรรยากาศด้านใน SKPGalleryชื่อ Galleryบรรยากาศโดยรอบ SKPGalleryชื่อ Galleryโมเดล ดาวเทียมประเภทต่างๆGalleryชื่อ Galleryห้องรับสัญญาณGalleryชื่อ Galleryห้องวางแผนถ่ายภาพGalleryชื่อ GalleryอาคารควบคุมดาวเทียมGalleryชื่อ GalleryภาพพาโนรามาGallery





















































































































































































































































































































-
คลังวิดีทัศน์
ความเป็นมาของ GISTDA